

An unmanned self-balancing driving two-wheel steering system
A steering system and self-balancing technology, applied in the direction of automatic steering control components, bicycles, steering rods, etc., can solve the problem that there are few related applications, can not realize unmanned, automatic balancing and autonomous driving, and can not achieve start-stop control And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the technical solution and characteristics of the self-balancing two-wheel steering system provided by the present invention clearer, the specific implementation will be described in detail below in conjunction with the contents in the accompanying drawings. It should be noted that the content described in the following specific embodiments is only one of all feasible implementation modes, and any implementation mode that conforms to the content in the claims of the present invention belongs to the protection scope of the present invention.
[0034] 1. System structure and workflow
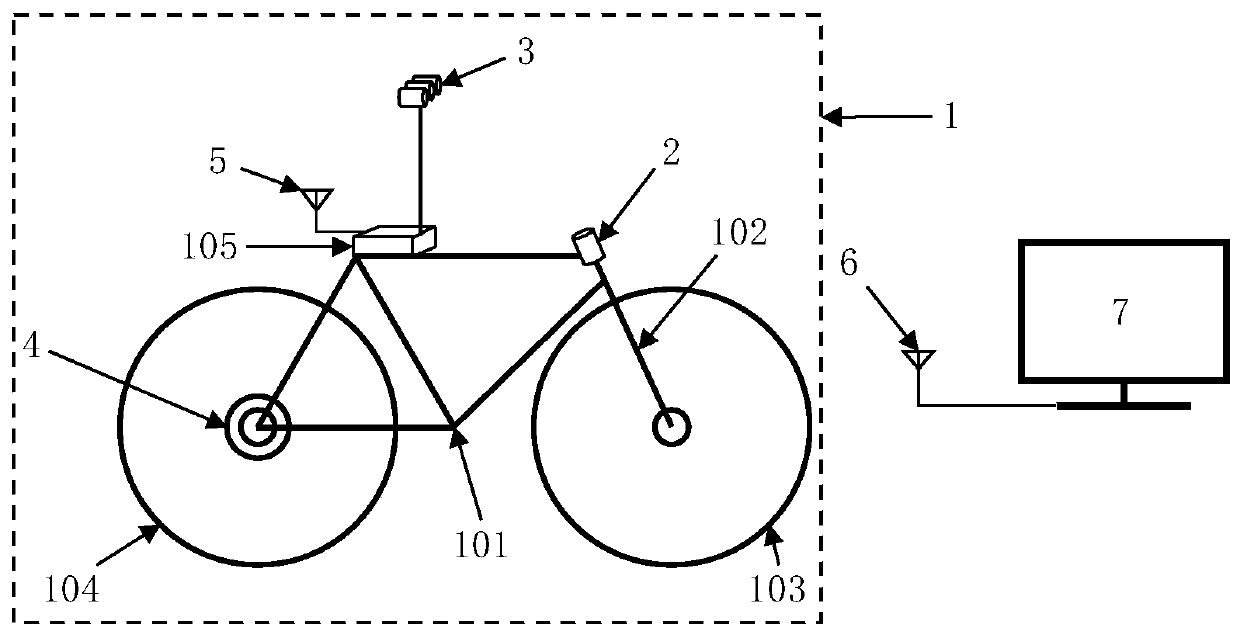
[0035] The present invention provides an unmanned self-balancing driving two-wheel steering system, comprising: a vehicle body 1, an attitude detection sensor module, a steering control motor module 2, a camera array module 3, an attitude adjustment gyroscope module, a traveling drive motor module 4, a wireless transmission Module, balance controller and upper computer 7; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More