Navigation control method of unmanned aerial vehicle group collaborative work
A control method and unmanned aerial vehicle technology, applied in three-dimensional position/course control, non-electric variable control, control/regulation system, etc., can solve problems such as limited load and inability to successfully complete tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
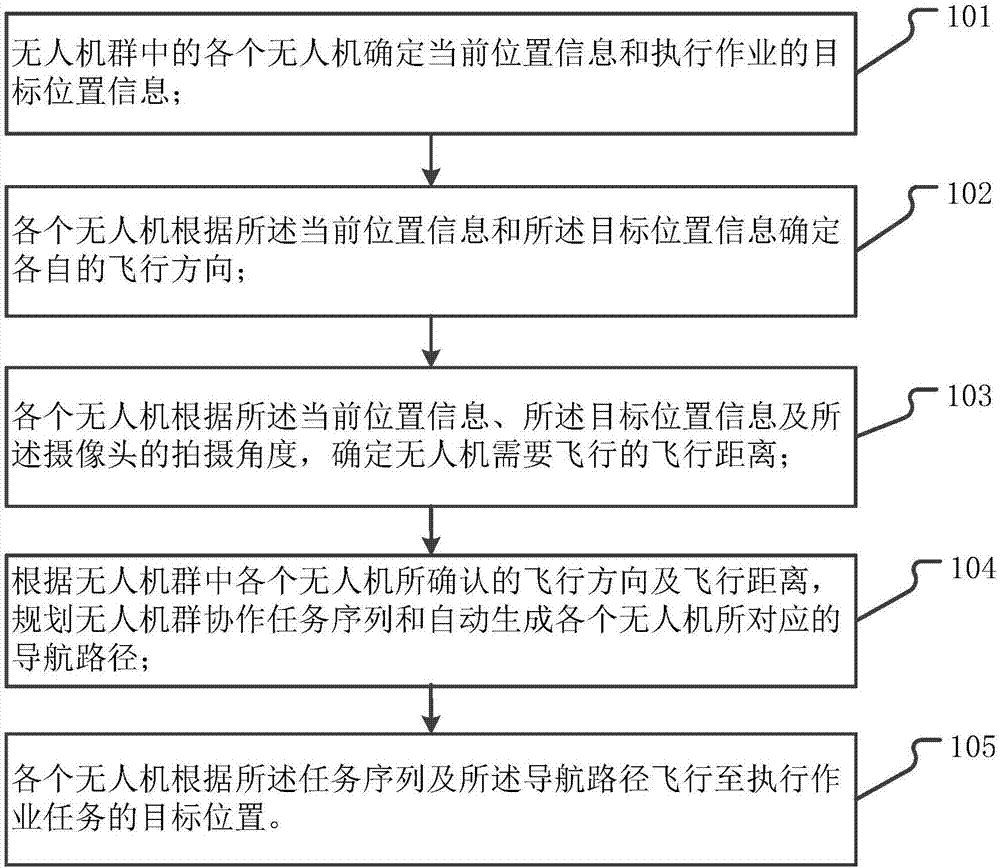
[0044] The present invention provides a navigation control method for unmanned aerial vehicles, such as figure 1 As shown, the method includes the following steps:
[0045] Step 101 , each UAV in the UAV group determines the current location information and the target location information of the operation.
[0046] Each unmanned aerial vehicle in the unmanned aerial vehicle group determines the current position information and the target position information of the execution operation.
[0047] In this method, since multiple UAVs in the entire UAV group work together, it is first necessary to input the respective destination location information for the UAVs in turn for the flight tasks to be performed by each UAV.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More