

Path planning device and method for unmanned underwater vehicle based on detection threat domain
A path planning, submersible technology, applied in the fields of navigation and map construction, unmanned submersible control, can solve the problem of not considering how to deal with the constraints of the way point and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
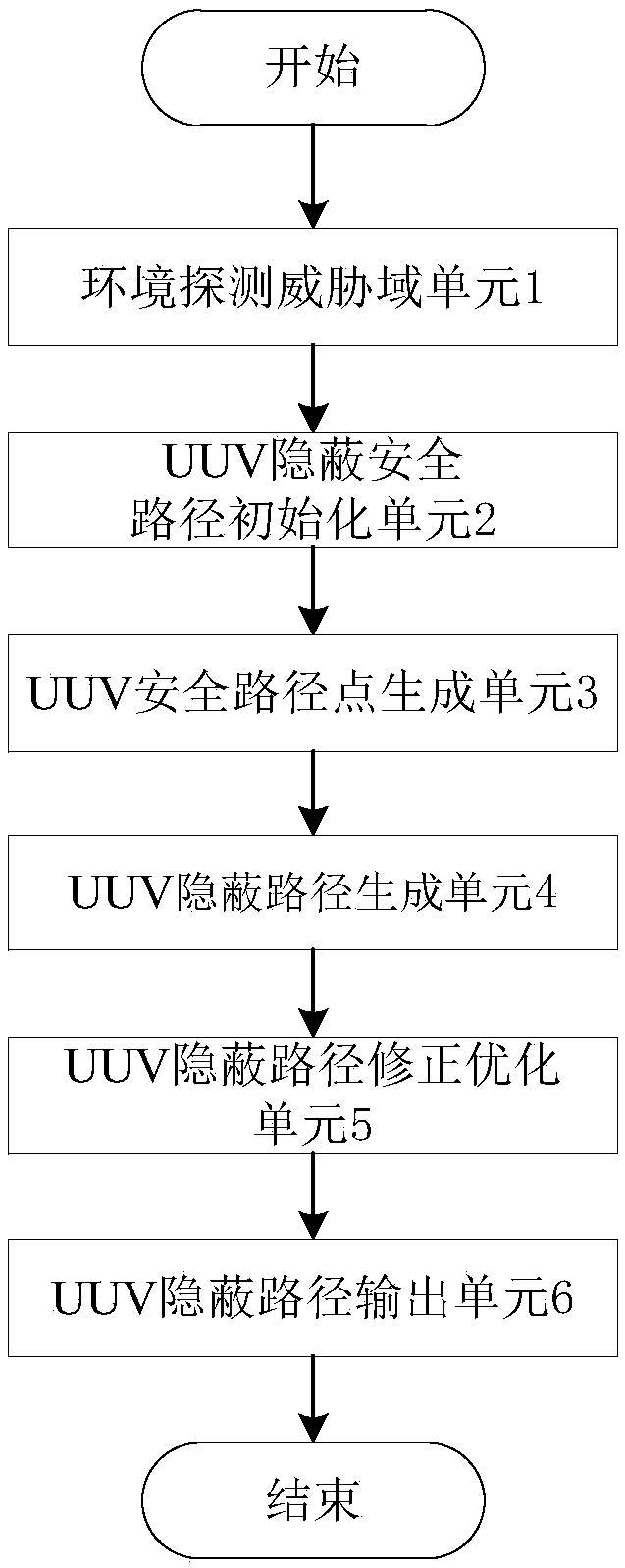
[0032] like figure 1 It shows a schematic structural diagram of an unmanned underwater vehicle path planning device based on a detection threat domain in an embodiment of the present invention. This structure can be realized in a computer, and is composed of an environment detection threat domain unit 1, a UUV concealed path initialization unit 2, and a UUV It consists of a safe waypoint generating unit 3, a UUV concealed path generating unit 4, a UUV concealed path correction and optimization unit 5, and a UUV concealed path output unit 6. The environment detection threat domain unit 1 constructs the basic spatial framework of UUV navigation according to the given underwater environment parameters according to a certain interpolation method, and uses the underwater visibility method to calculate the threat indicators that can be dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More