Robot end executor for clamping irregular workpiece
An end-effector, robot technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of poor movement and precise positioning, and achieve the effect of high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
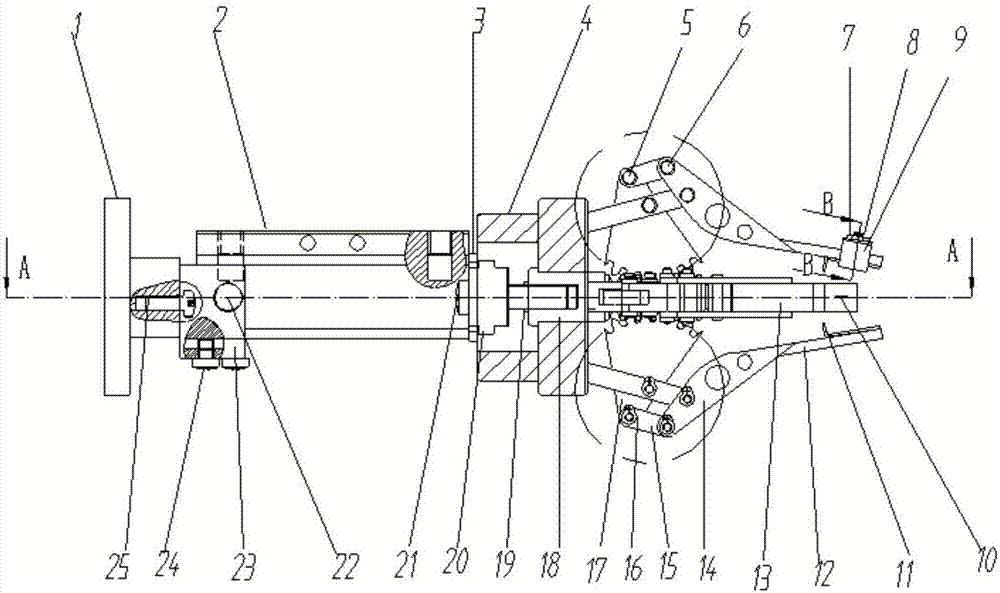
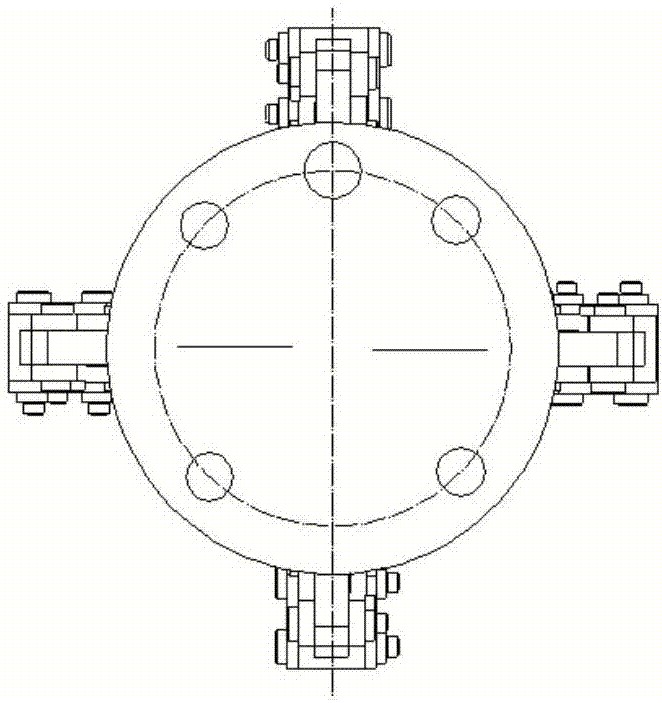
[0022] The present invention will be further described below in conjunction with the accompanying drawings.
[0023] refer to Figure 1 to Figure 10 , a robot end effector for clamping irregular workpieces, including a clamping positioning mechanism, a transmission mechanism, a drive mechanism, and a flange connection piece connected to the end flange of the robot, the drive mechanism is connected to the flange connection piece, the The action end of the driving mechanism is connected with the transmission mechanism, and the transmission mechanism is connected with the clamping and positioning mechanism. It is characterized in that: the clamping and positioning mechanism includes a two-finger finger and an auxiliary positioning spring finger. Two of the fingers are arranged opposite to each other, and the clamping station is between the two fingers. There are two auxiliary positioning spring fingers, and the two auxiliary positioning spring fingers are arranged opposite to eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More