

Driver steering control method based on brain emotional learning loop model
A technology for steering control and driver, applied to automatic steering control components, steering mechanisms, steering rods, etc., can solve the problems of not being able to simulate driver's cognitive behavior, and the evaluation of vehicle safety performance is not objective enough, to achieve good consistency, Increase the safety performance and the effect of precise tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
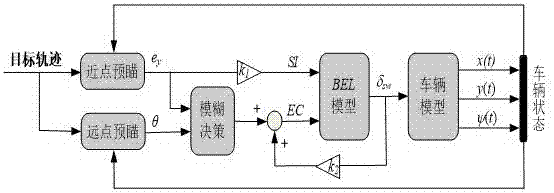
[0045] The purpose of the present invention is to realize the simulation of the driver's driving in order to ensure the driving safety during the driving process of the smart car, so as to accurately grasp the driving track of the vehicle. In order to realize the purpose, the structural frame of the method adopted by the present invention is as Figure 4 shown. Among them: SI and EC are output for the above step 1 through near-point preview and far-point preview; SI and EC signals are input into the BEL model to generate steering wheel angle δ sw , turning the steering wheel angle δ sw Input the vehicle model to output the state parameters of the vehicle, and repeat the above steps to accurately grasp the vehicle's driving trajectory.
[0046] Embodiment is a kind of driver's steering control method based on brain emotion learning loop model, and its specific control process includes:
[0047]S1: Parameter initialization: respectively set the proportional adjustment factors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More