

Unmanned aerial vehicle-based data acquisition method and system for individual building modeling
A technology for data acquisition and unmanned aerial vehicles, which is applied in control/regulation systems, measuring devices, instruments, etc., and can solve the problems of incomplete side texture information and low degree of refinement of modeling results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
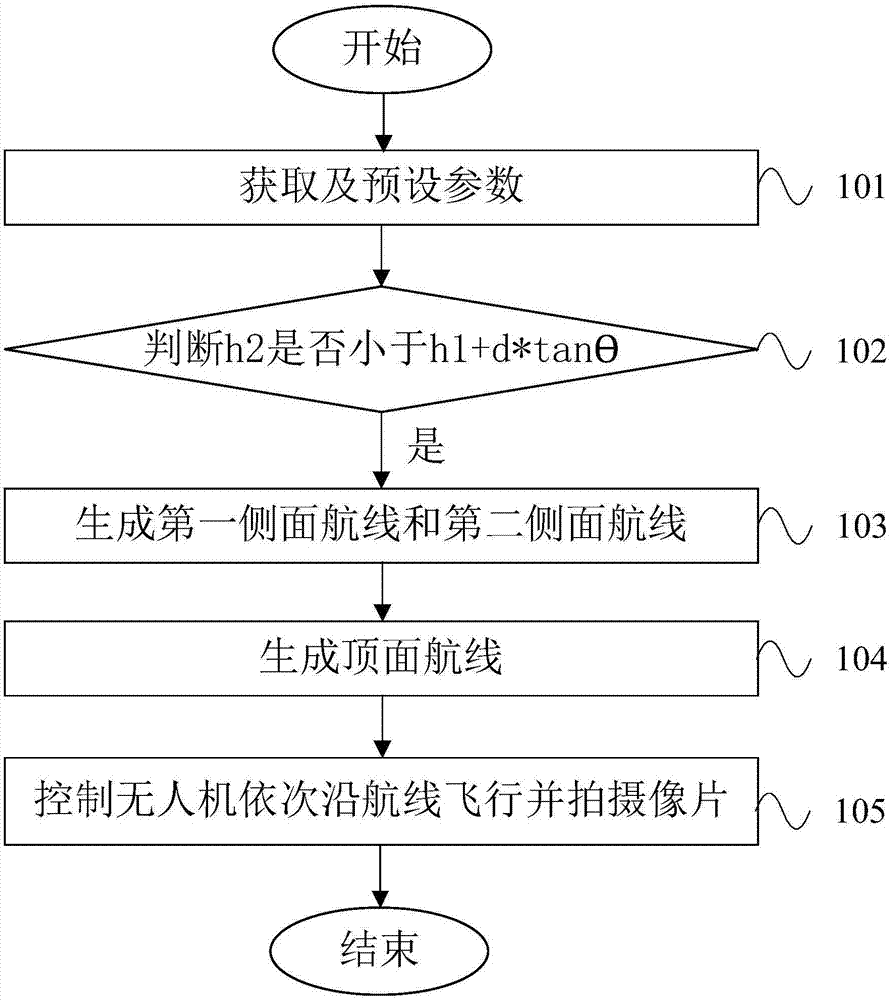
[0108] Such as figure 1 As shown, a UAV-based data acquisition method for single building modeling, the single building includes a top surface, several sides and the joint between surfaces, the UAV carries a camera, and the The data collection method includes the following steps:
[0109] Step 101, obtaining the building height h of the single building 1 , the safe height h of the UAV 2 , the default lateral overlap P 1 and heading overlap P 2 , the initial distance d between the preset camera and the shooting surface, the value of the preset shooting angle θ, fov 1 / 21 Indicates the vertical field of view of the camera;
[0110] Step 102, judge h 2 Is it less than h 1 +d*tanθ, if so, execute step 103;
[0111] Step 103, the height for the side is greater than or equal to the safety height h 2 The part of generates a number of first side routes surrounding the side, the distance between the first side route and the side to be photographed is equal to d, the first side...
Embodiment 2
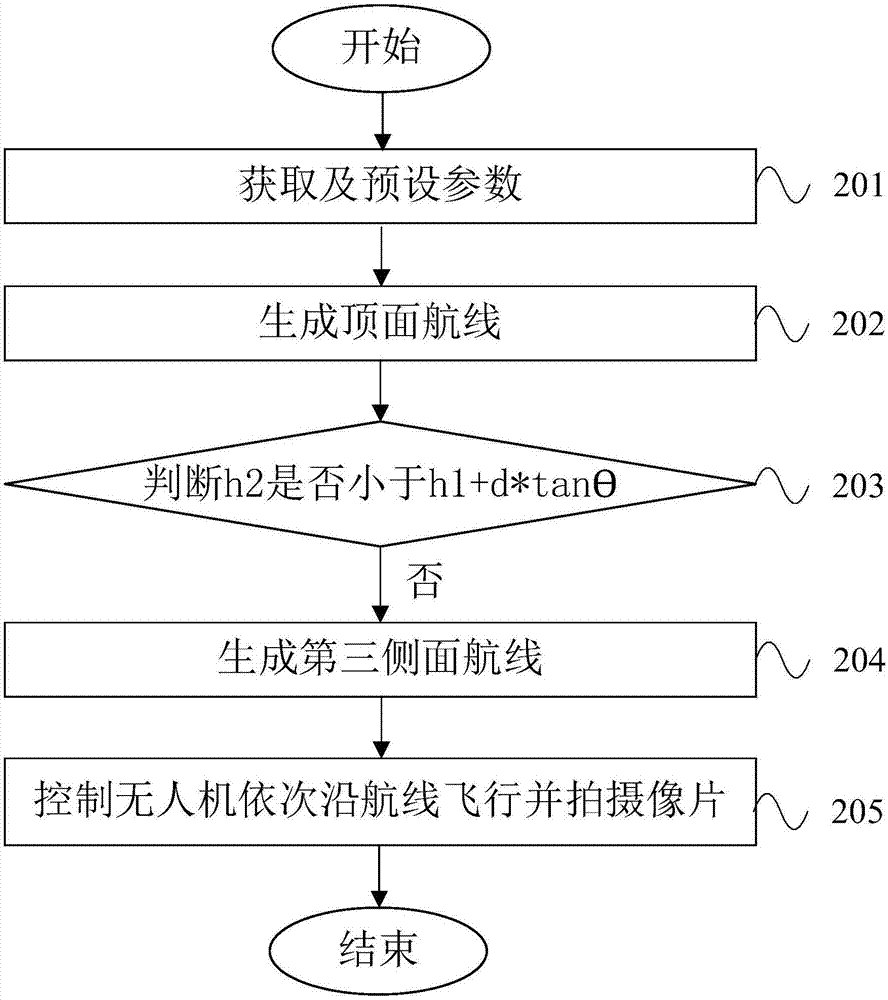
[0128] Such as figure 2 As shown, the difference from Example 1 is that in this example h 2 greater than h 1 +d*tanθ, the data collection method comprises the following steps:
[0129] Step 201, obtain the building height h of the single building 1 , the safe height h of the UAV 2 , the default lateral overlap P 1 , preset heading overlap P 2 , the initial distance d between the preset camera and the shooting surface, the value of the preset shooting angle θ, fov 1 / 21 Indicates the vertical field of view of the camera;
[0130] Step 202, using the route planning method of aerial photogrammetry on the top surface to generate the top surface route;
[0131] Step 203, judge h 2 Is it less than h 1 +d*tanθ, otherwise execute step 204;
[0132] Step 204, generate a number of third side routes around the side, the height of the third side routes is h 2 , the third side routes are distributed at intervals along the horizontal direction, and the third side routes are para...
Embodiment 3
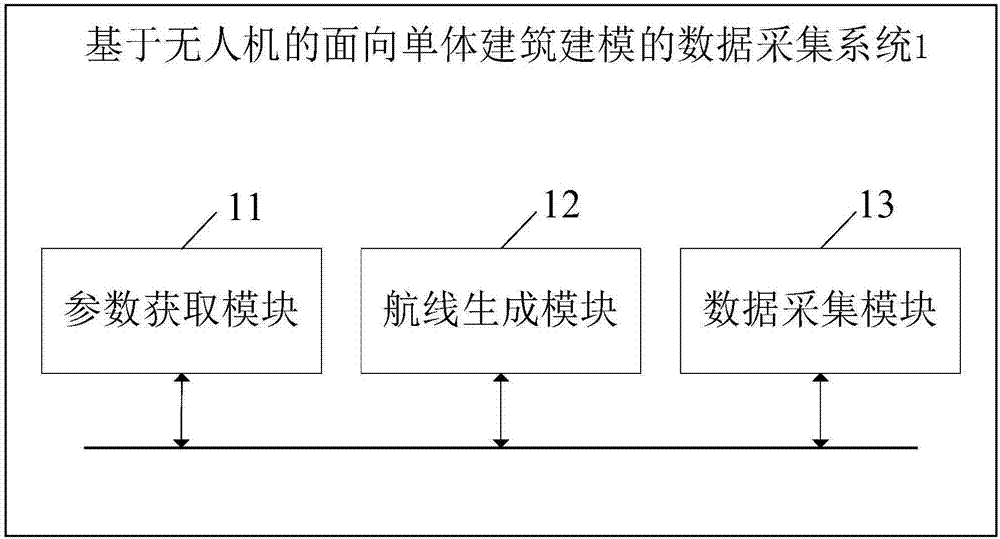
[0142] Such as Figures 3 to 5 As shown, a UAV-based data acquisition system 1 for modeling of a single building, the single building includes a top surface, several sides and the junction between surfaces, the UAV carries a camera, and the The data acquisition system 1 includes a parameter acquisition module 11, a route generation module 12 and a data acquisition module 13; the route generation module 12 includes a judgment module 1201, a top route generation module 1202, a first side route generation module 1203, a second side A route generation module 1204 and a third side route generation module 1205; the data collection module 13 includes a top data collection module 1301 , a first data collection module 1302 and a second data collection module 1303 .
[0143] The parameter acquisition module 11 is used to acquire the building height h of the single building 1 and the safe height h of the UAV 2 , the parameter acquisition module 11 is also used to preset the degree of l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More