

Superposed hybrid sine maneuvering path planning method
A path planning and maneuvering technology, applied in the field of control, can solve the problems of long tracking control adjustment time, poor attitude stability index, time delay, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
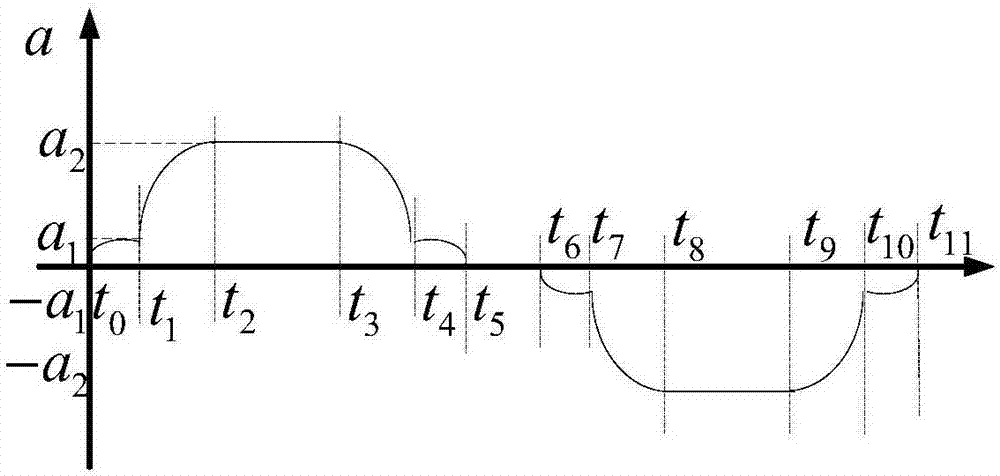
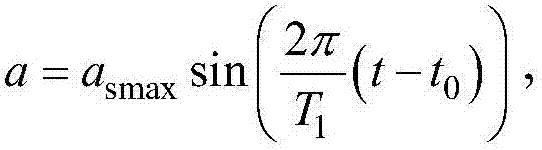
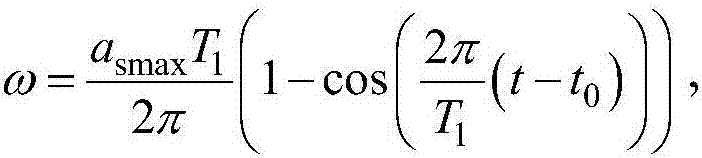
[0077] When the satellite maneuvers agilely, due to the large maneuvering angle and short maneuvering time, the satellite attitude angular acceleration is required to accelerate and decelerate rapidly. However, in actual engineering, the dynamic performance of the control moment gyro is limited, especially when the dynamic tracking performance is poor when crossing zero, it cannot immediately track the fast acceleration curve. In order to adapt to the dynamic characteristics of the control moment gyroscope, this patent proposes a maneuvering strategy in which the control moment gyroscope accelerates (decelerates) slowly in the zero-crossing segment with poor tracking performance, and accelerates (decelerates) quickly with the maximum output capability in the segment with excellent tracking performance. Considering the stable requirements of attitude maneuvers, a symmetrical acceleration and deceleration process is designed to ensure that the attitude angular velocity is zero at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More