

Fuzzy self-adjusting deviation coupling multi-motor synchronous control method
A technology of deviation coupling and synchronous control, which is applied in the direction of speed adjustment of multiple motors, can solve the problems of large tracking error, long adjustment time, and large synchronization error, and achieve the goal of improving synchronization performance, accelerating response speed, and reducing synchronization error Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043]A fuzzy self-adjusting deviation-coupled multi-motor synchronous control method of the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
[0044] The present invention introduces the dynamic and static performance of each motor in the multi-motor control system with the permanent magnet synchronous motor (PMSM) as the object, and the PMSM equation of motion is
[0045]
[0046] In the formula, J is the moment of inertia; ω is the rotor angular velocity of the motor; T e is the electromagnetic torque; T L is the load torque; K T Is the torque coefficient; B is the friction coefficient.
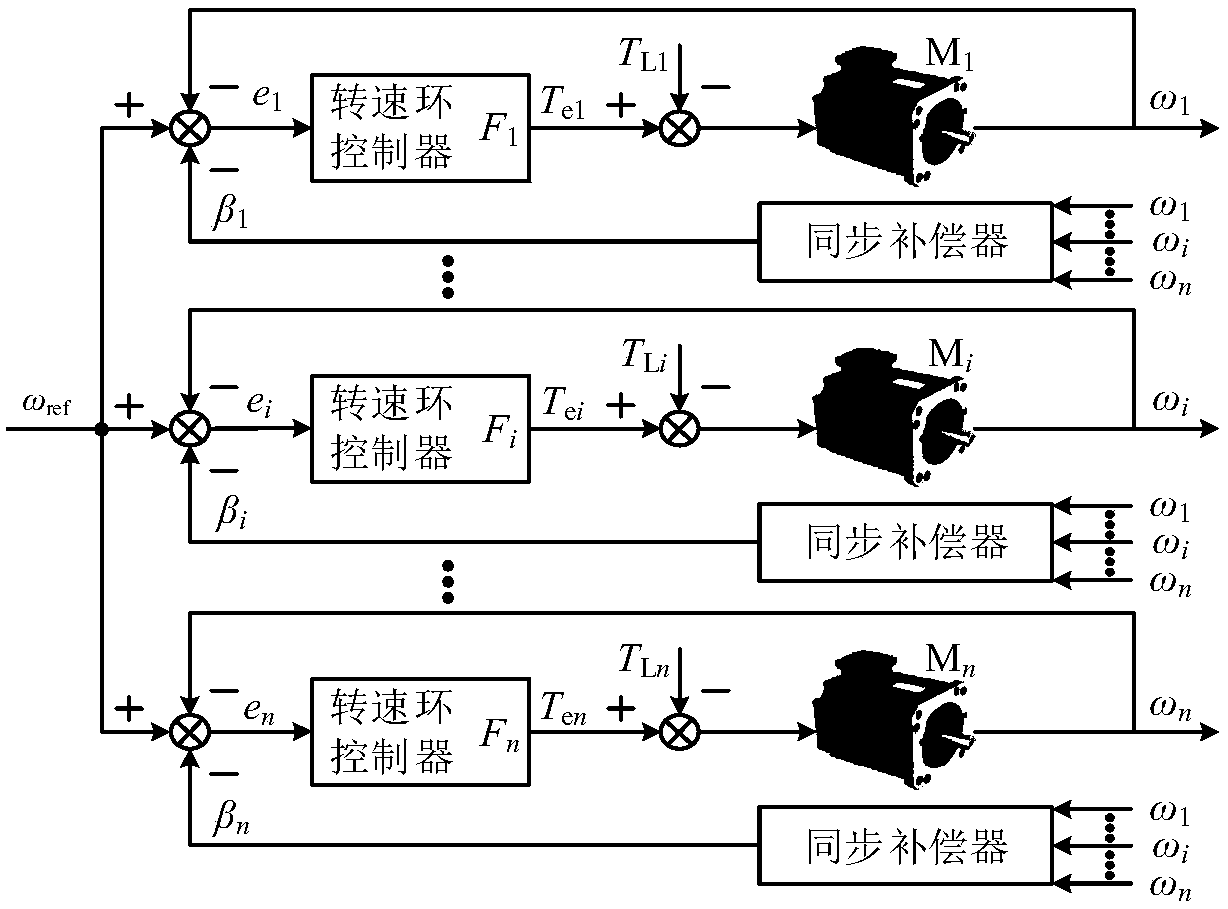
[0047] For the convenience of analysis, the motor system is usually equivalent to an integral link, ignoring the delay of the current loop and the delay of speed measurement. The structural block diagram of deviation coupling control is shown in Fig. 1. In the figure, ω ref is the given speed of each motor; T Li i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More