Height-adjustable industrial transport robot
A robot and high-level technology, applied in the field of robots, can solve the problems of easy falling of objects, skewed placement, unstable grasping, etc., and achieve the effect of stable transportation of objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below with reference to the accompanying drawings, so that those skilled in the art can implement it with reference to the text of the description.
[0027] It should be understood that terms such as "having", "including" and "including" used herein do not equate the presence or addition of one or more other elements or combinations thereof.
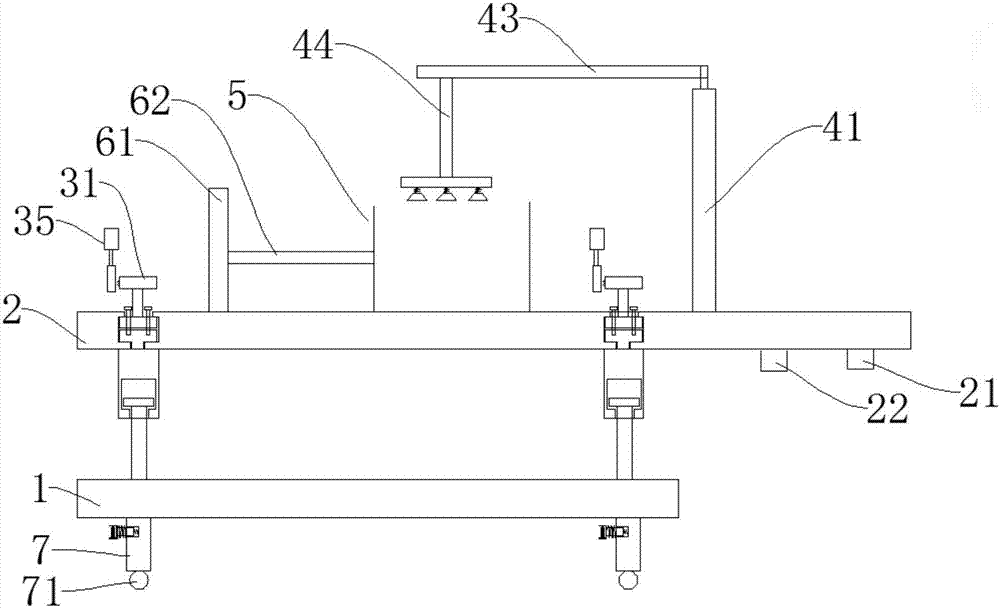
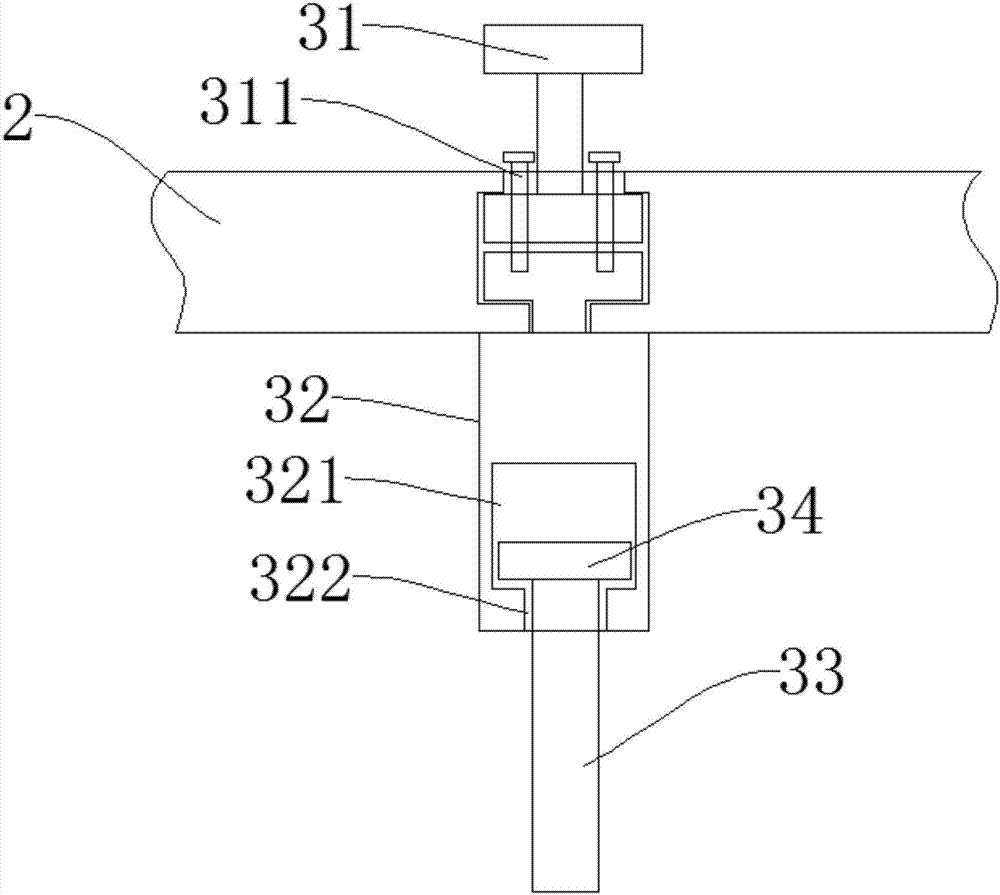
[0028] Such as Figure 1-6 As shown, the present invention provides a height-adjustable industrial transportation robot, including:
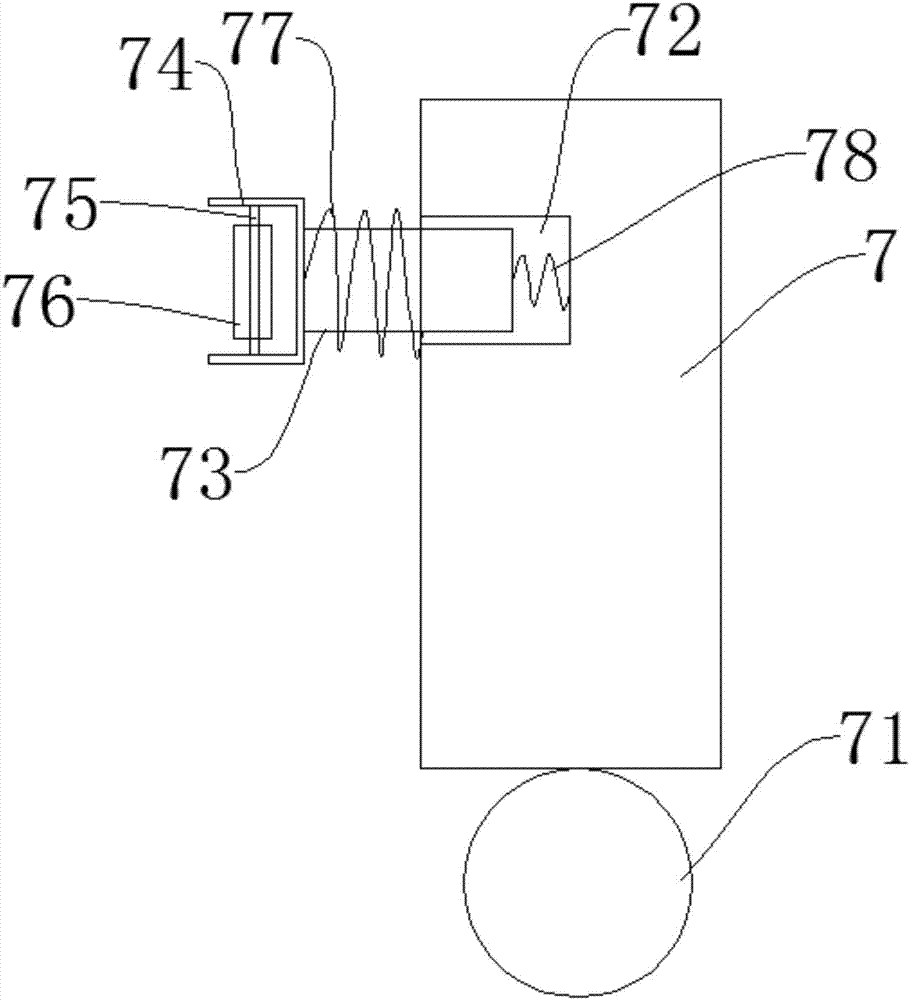
[0029] The base 1, the four corners of the lower end of the base 1 are equipped with pillars 7, each pillar 7 is provided with a drive wheel 71 at the lower end, the side of the pillar 7 is provided with a first groove 72, the first groove 72 is provided There is a rod 73, a first spring 78 is provided between the support rod 73 and the bottom surface of the first groove 72, the support rod 73 extends out of the first groove 72, and the support rod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More