

Autonomous unmanned plane in-out control method
A control method and unmanned aerial vehicle technology, applied in the direction of attitude control, three-dimensional position/channel control, etc., can solve the problems of multi-airport resources, occupancy, and tight use of main runway resources, so as to reduce dwell time, improve combat effectiveness, and facilitate The effect of troops
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions in the embodiments of the present invention will be described in more detail below in conjunction with the drawings in the embodiments of the present invention.
[0033] The present invention provides a control method for autonomous driving in and out of an unmanned aerial vehicle suitable for a four-point landing gear layout, and the control method includes:
[0034] First establish the UAV ground taxi trajectory;
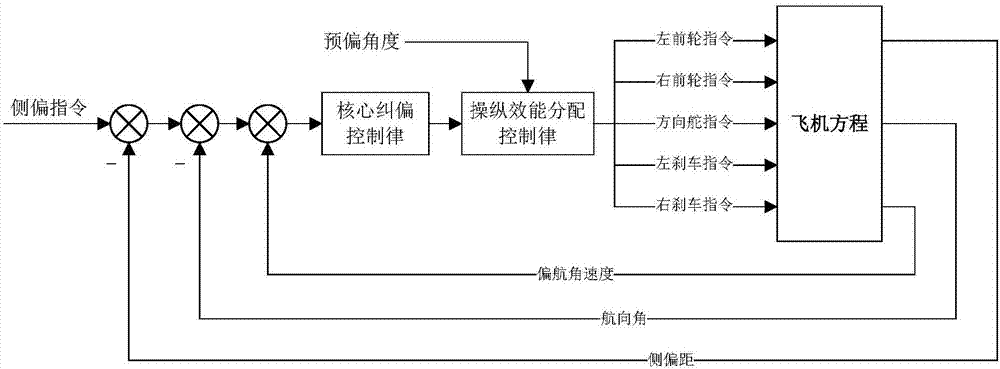
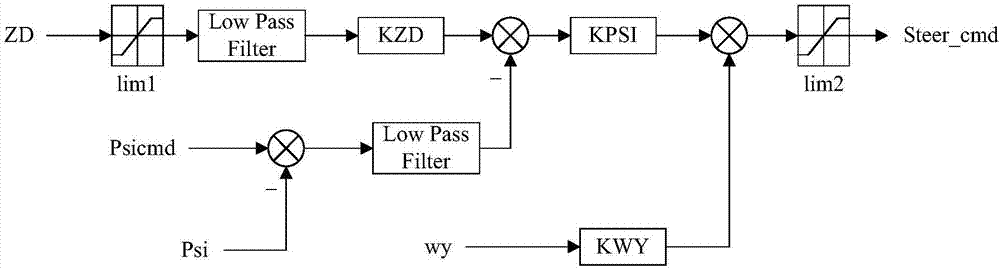
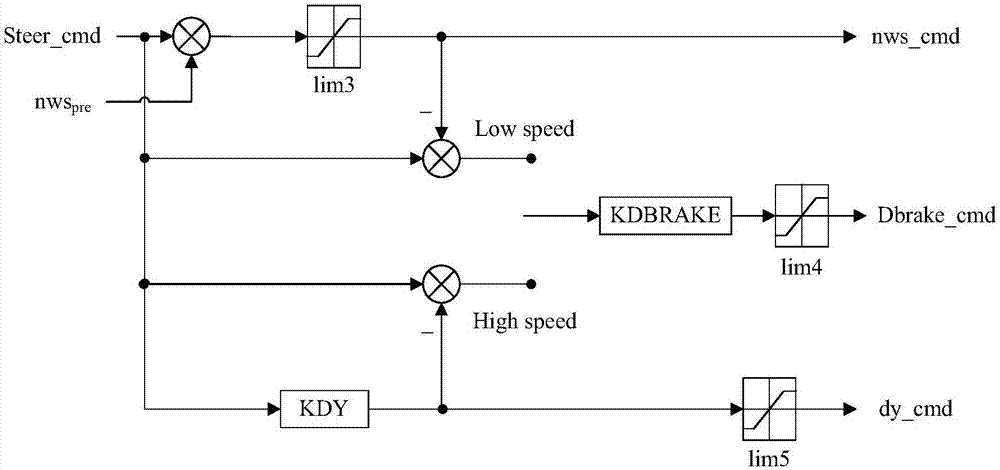
[0035] Afterwards, the control law is calculated according to the ground taxiing trajectory to obtain the lateral deviation command acting on the operation effector;
[0036] Finally, the operation effector controls the UAV to track the sliding trajectory and drive autonomously according to the lateral deviation command.
[0037] In the above control method, analyze or design the main functional parts:
[0038] (a) Handling effecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More