Rehabilitation training robot and training method thereof
A technology for rehabilitation training and robotics, applied in passive exercise equipment, physical therapy, etc., can solve problems such as complex structures, and achieve reliable connection, convenient disassembly and assembly, and good mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
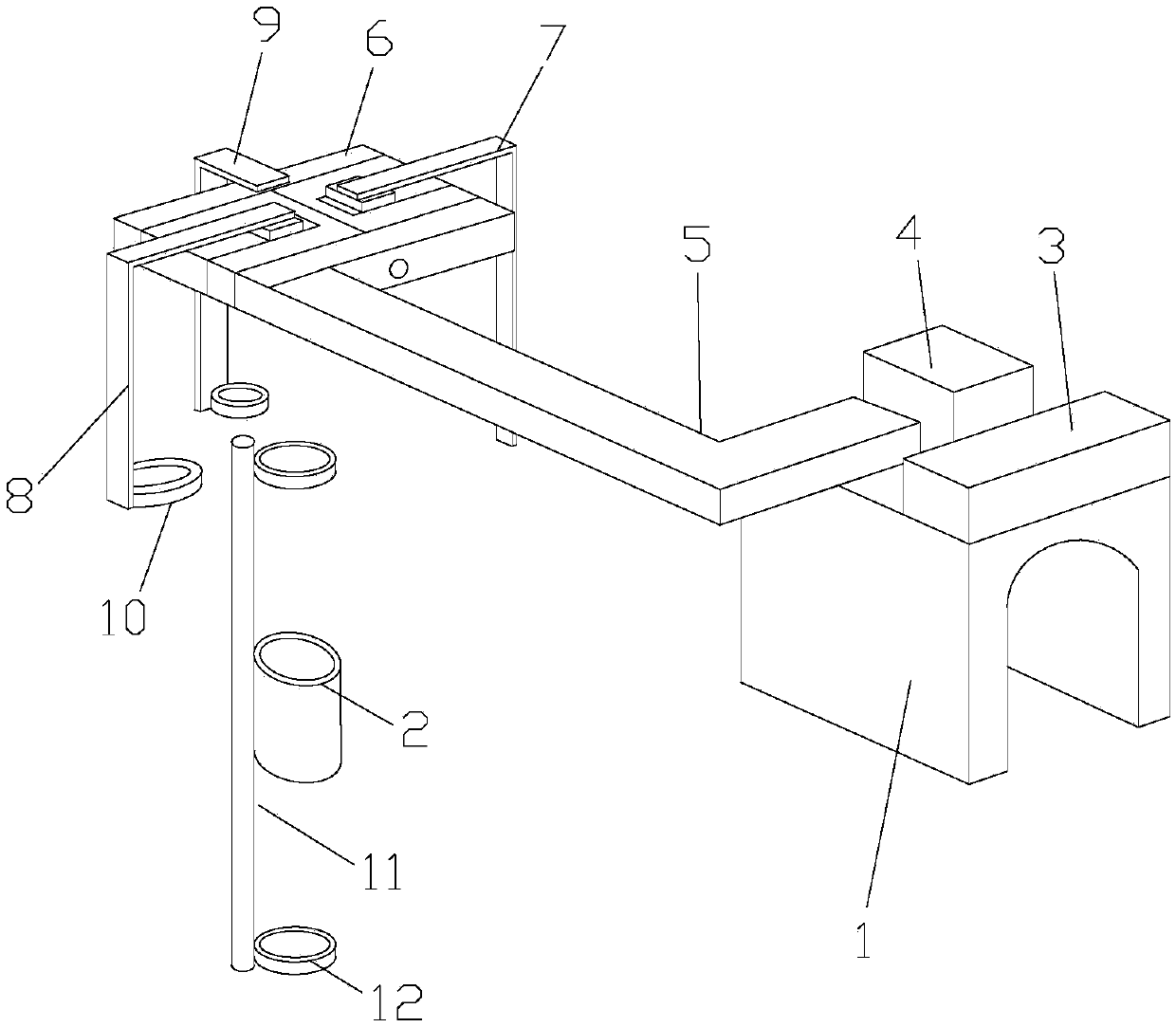
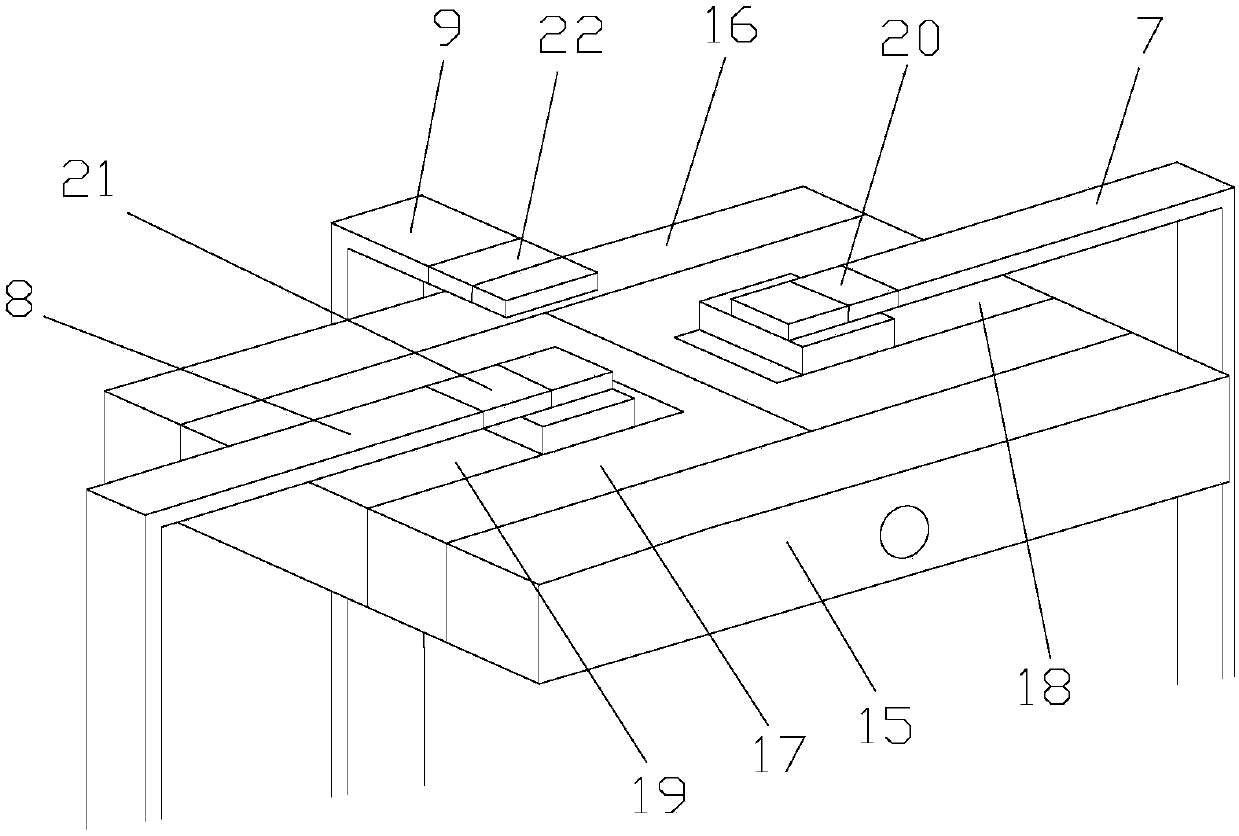
[0025] Such as Figure 1-3As shown, a rehabilitation training robot includes a clamping device 1 for clamping the shoulder, an elbow sheath 2, a control device 3 and an air pump 4, the clamping device 1 is provided with a connecting rod 5, and the connection The end of the rod 5 is provided with a carrier plate 6, and the carrier plate 6 is provided with an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move forward, and an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move backward. The second two-way shape memory alloy strip 8 and the L-shaped third two-way shape memory alloy strip 9 used to drive the upward movement of the arm, the first two-way shape memory alloy strip 7, the second two-way shape memory alloy The ends of the alloy strip 8 and the third two-way shape memory alloy strip 9 are both provided with a first hoop 10 for holding the arm, and the elbow sheath 2 is provided with a fourth two-way for driving the arm...
Embodiment 2
[0028] Such as Figure 1-3 As shown, a rehabilitation training robot includes a clamping device 1 for clamping the shoulder, an elbow sheath 2, a control device 3 and an air pump 4, the clamping device 1 is provided with a connecting rod 5, and the connection The end of the rod 5 is provided with a carrier plate 6, and the carrier plate 6 is provided with an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move forward, and an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move backward. The second two-way shape memory alloy strip 8 and the L-shaped third two-way shape memory alloy strip 9 used to drive the upward movement of the arm, the first two-way shape memory alloy strip 7, the second two-way shape memory alloy The ends of the alloy strip 8 and the third two-way shape memory alloy strip 9 are both provided with a first hoop 10 for holding the arm, and the elbow sheath 2 is provided with a fourth two-way for driving the ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More