A rehabilitation training robot
A technology for rehabilitation training and robotics, applied in passive exercise equipment, physical therapy, etc., can solve problems such as complex structures, and achieve reliable connection, convenient maintenance, and good mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
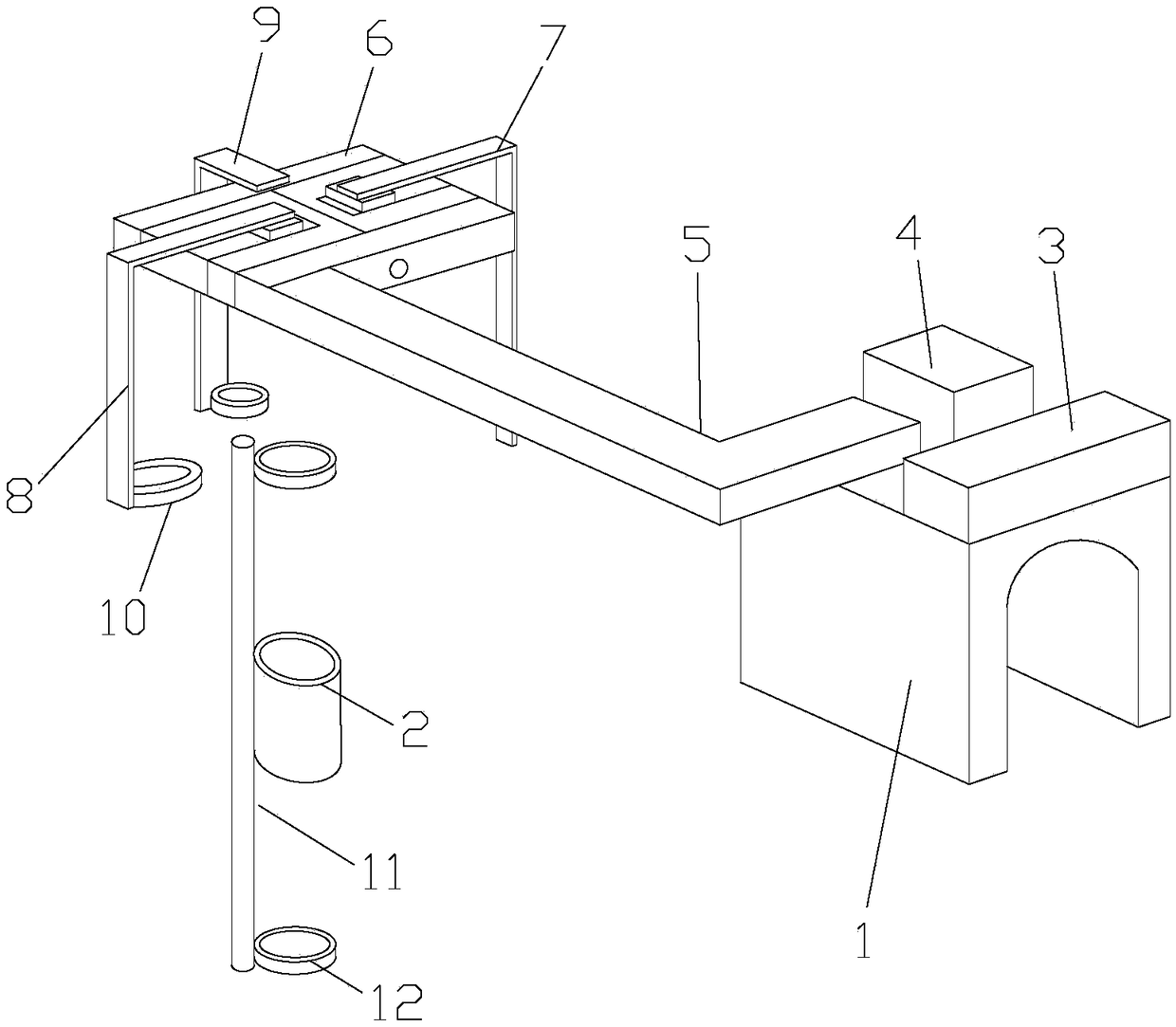
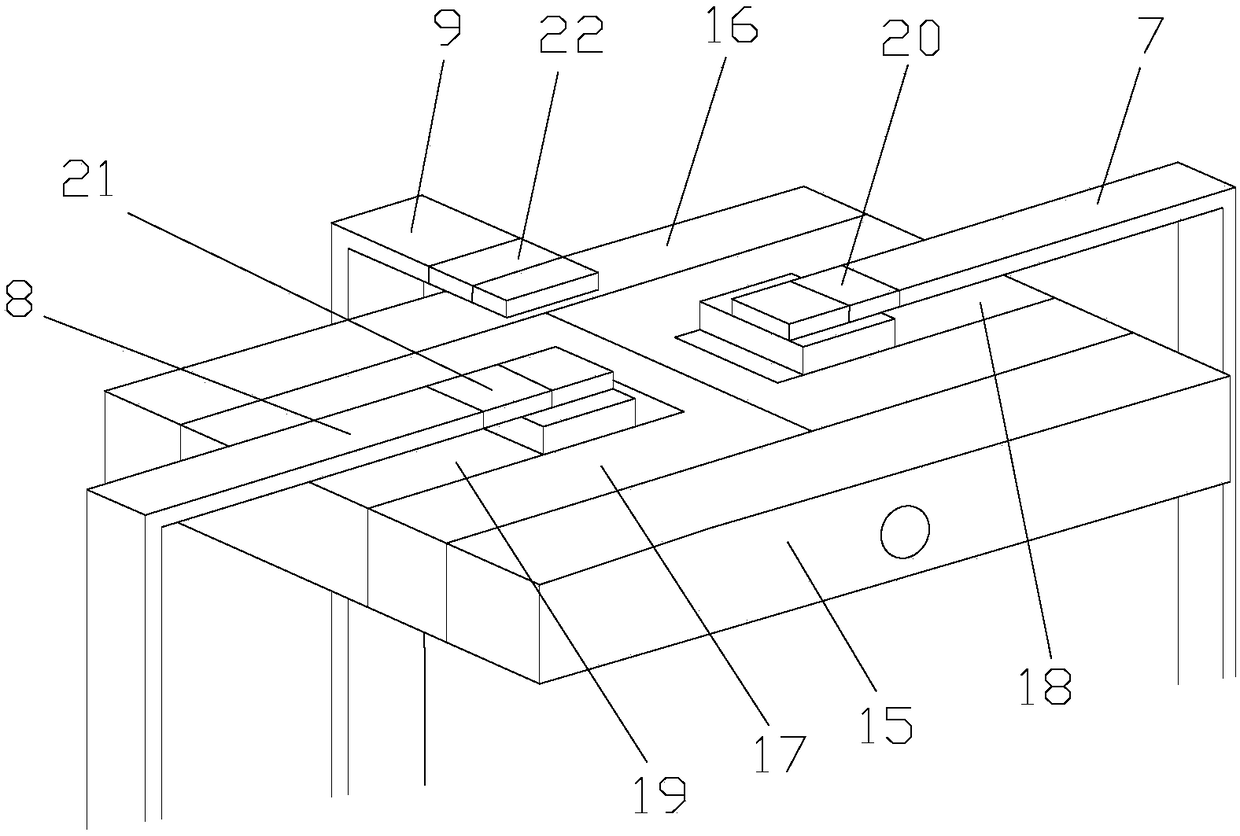
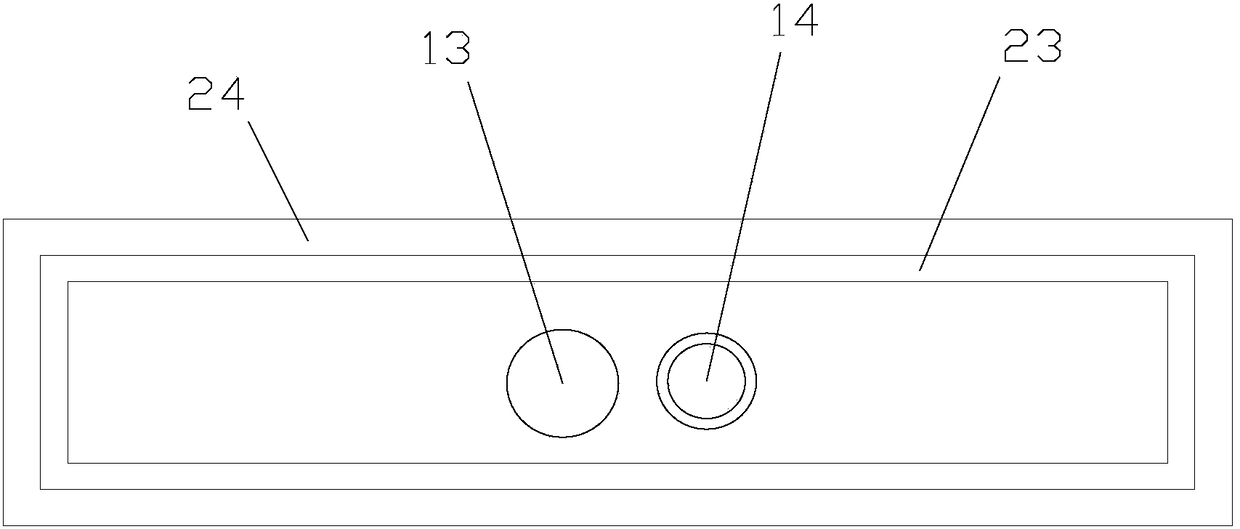
[0025] like Figure 1-3As shown, a rehabilitation training robot includes a clamping device 1 for clamping the shoulder, an elbow sheath 2, a control device 3 and an air pump 4, the clamping device 1 is provided with a connecting rod 5, and the connection The end of the rod 5 is provided with a carrier plate 6, and the carrier plate 6 is provided with an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move forward, and an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move backward. The second two-way shape memory alloy strip 8 and the L-shaped third two-way shape memory alloy strip 9 used to drive the upward movement of the arm, the first two-way shape memory alloy strip 7, the second two-way shape memory alloy The ends of the alloy strip 8 and the third two-way shape memory alloy strip 9 are both provided with a first hoop 10 for holding the arm, and the elbow sheath 2 is provided with a fourth two-way for driving the arm to...
Embodiment 2
[0028] like Figure 1-3 As shown, a rehabilitation training robot includes a clamping device 1 for clamping the shoulder, an elbow sheath 2, a control device 3 and an air pump 4, the clamping device 1 is provided with a connecting rod 5, and the connection The end of the rod 5 is provided with a carrier plate 6, and the carrier plate 6 is provided with an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move forward, and an L-shaped first two-way shape memory alloy strip 7 for driving the arm to move backward. The second two-way shape memory alloy strip 8 and the L-shaped third two-way shape memory alloy strip 9 used to drive the upward movement of the arm, the first two-way shape memory alloy strip 7, the second two-way shape memory alloy The ends of the alloy strip 8 and the third two-way shape memory alloy strip 9 are both provided with a first hoop 10 for holding the arm, and the elbow sheath 2 is provided with a fourth two-way for driving the arm t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More