

Method and device for controlling robot to grab object
A technology for robots and objects, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of high implementation cost, complex target recognition process, low efficiency in calculating joint variables, etc., and achieve the effect of flexible recognition and acquisition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to enable those skilled in the art to better understand the technical solutions in the present application, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. Obviously, the described The embodiments are only some of the embodiments of the present application, but not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the scope of protection of this application.
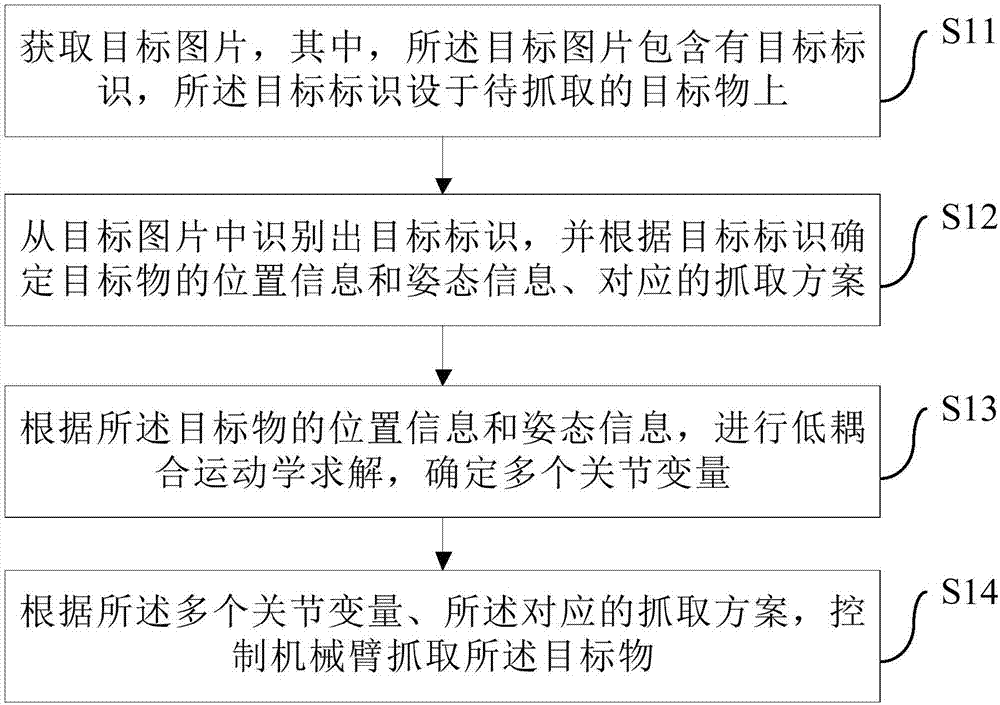
[0048]Considering the existing methods for controlling the robot to grab the target, the identification process is relatively complicated and the cost of identification is relatively high due to the need to specifically identify various features of the target itself. Also, due to the high degree of coupling between the multiple joint vari...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More