

Walking-assistant boot
A kind of walking boots and myoelectric technology, which can be applied in the direction of equipment to help people walk, physical therapy, etc., can solve the problems of too many motors, not flexible enough, and difficult to control the device stably, so as to reduce the degree of force, easy to wear, and stable in structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific embodiments and examples of the present invention will be described in detail below in conjunction with the accompanying drawings. The described specific embodiments are only used to explain the present invention, and are not intended to limit the specific embodiments of the present invention.
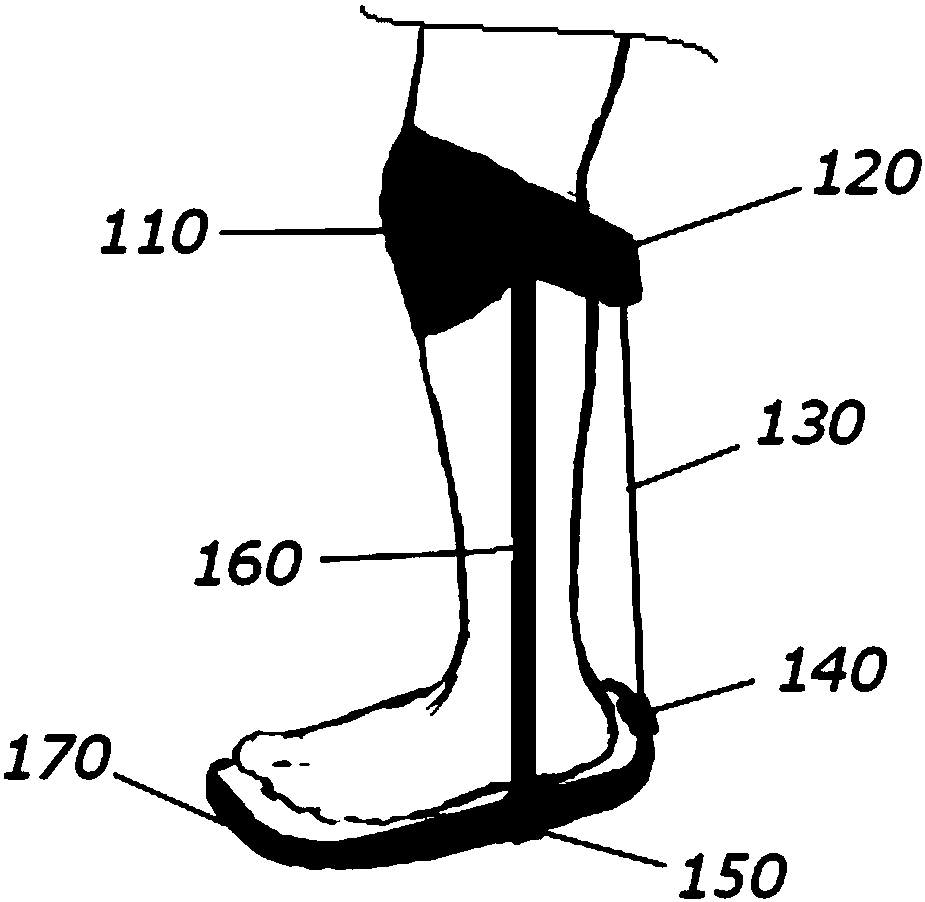
[0026] Such as figure 1 as shown, figure 1 It is a structural schematic diagram of an embodiment of the walking aid boot of the present invention, the walking aid boot includes a knee pad body 110, a myoelectric controller 120, a drawstring 130, an inner and outer fixing rod 160, and a sole plate 170; wherein, the knee pad body 110 is used for Wrapped at the knee of the user's left leg or right leg when in use, the myoelectric controller 120 is installed at the rear of the knee pad body 110 and is located at the upper part of the calf muscle group when in use. The drawstring 130 The upper end is connected to the myoelectric controller 120, and the lower end of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More