Self-balancing robot, speed control device and speed control method thereof
A speed control, self-balancing technology, applied in the field of robotics, can solve problems such as unsuitable self-balancing robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The exemplary embodiments will be described in detail here, and examples thereof are shown in the accompanying drawings. When the following description refers to the accompanying drawings, unless otherwise indicated, the same numbers in different drawings represent the same or similar elements. The implementation manners described in the following exemplary embodiments do not represent all implementation manners consistent with the present disclosure. Rather, they are only examples of devices and methods consistent with some aspects of the present disclosure as detailed in the appended claims.
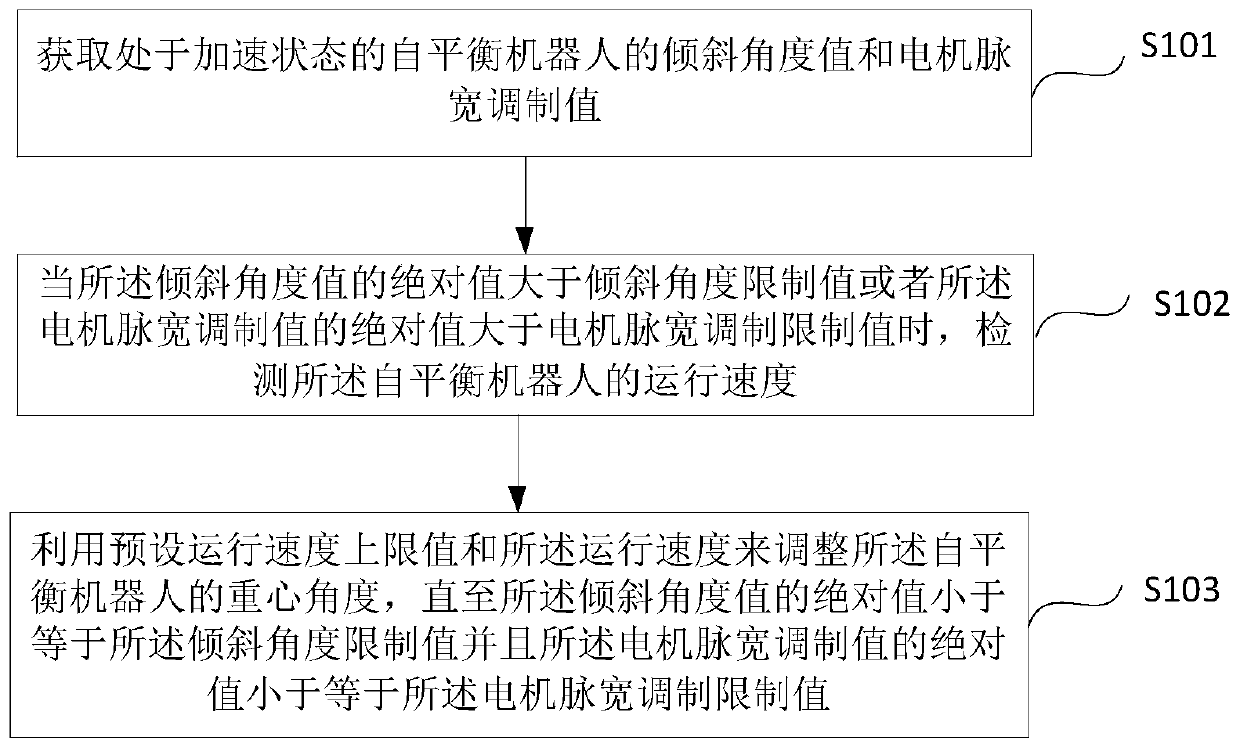
[0051] figure 1 It is a flow chart showing a speed control method for a self-balancing robot according to an exemplary embodiment. Such as figure 1 As shown, the method may include step S101 to step S103.
[0052] In step S101, the inclination angle value Aslp and the motor pulse width modulation value Pmve of the self-balancing robot in the accelerated state are acquired.
[0053] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More