

A Fast Iterative Calculation Method for Semi-Dense Stereo Matching
A stereo matching and iterative computing technology, applied in the field of computer vision, can solve problems such as unreachable, high processing efficiency, high processing frame rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
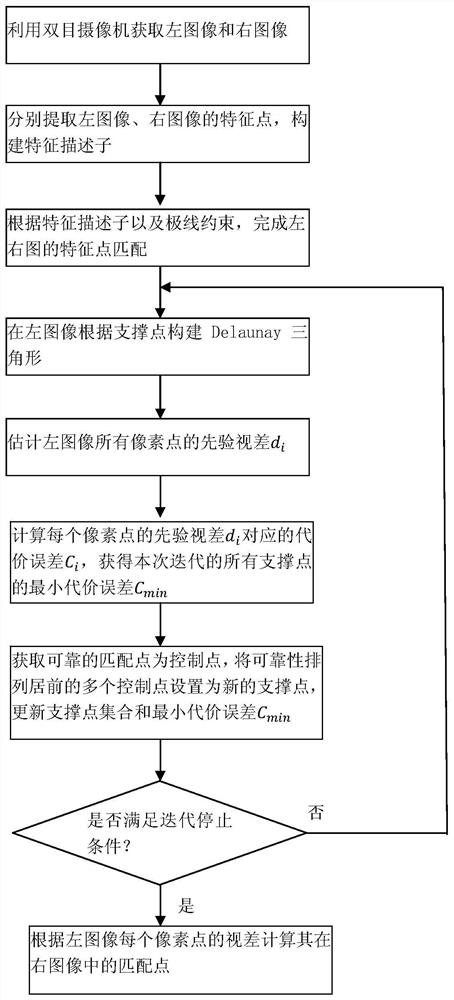
[0051]Such asfigure 1As shown, the rapid iterative calculation method of the semi-thickening mechanism in this embodiment includes the following implementation steps:
[0052]S1: Using the binocular camera to get the left image and right image;
[0053]In this embodiment, the image acquired by the left camera header of the binocular camera is referred to as a left image, and the image acquired by the right camera header of the binocular camera is referred to as the right image.
[0054]S2: Extract the characteristic point of the left image, the right image, and build a feature descriptor;
[0055]This embodiment uses the SIFT algorithm (scale constant feature conversion algorithm) to extract the left image and the right image, respectively:
[0056]That is, the Gaussian filter is first used to establish a plurality of secondary continuous filters to establish the first scale group; reducing the left image or right image to half of the same Gaussian filter forming a second scale group; The left ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More