

A 2d to 3d depth estimation method
A depth estimation and 3D technology, which is applied in the field of image processing and stereo vision, can solve problems such as depth estimation errors, and achieve accurate and high-quality parallax estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach
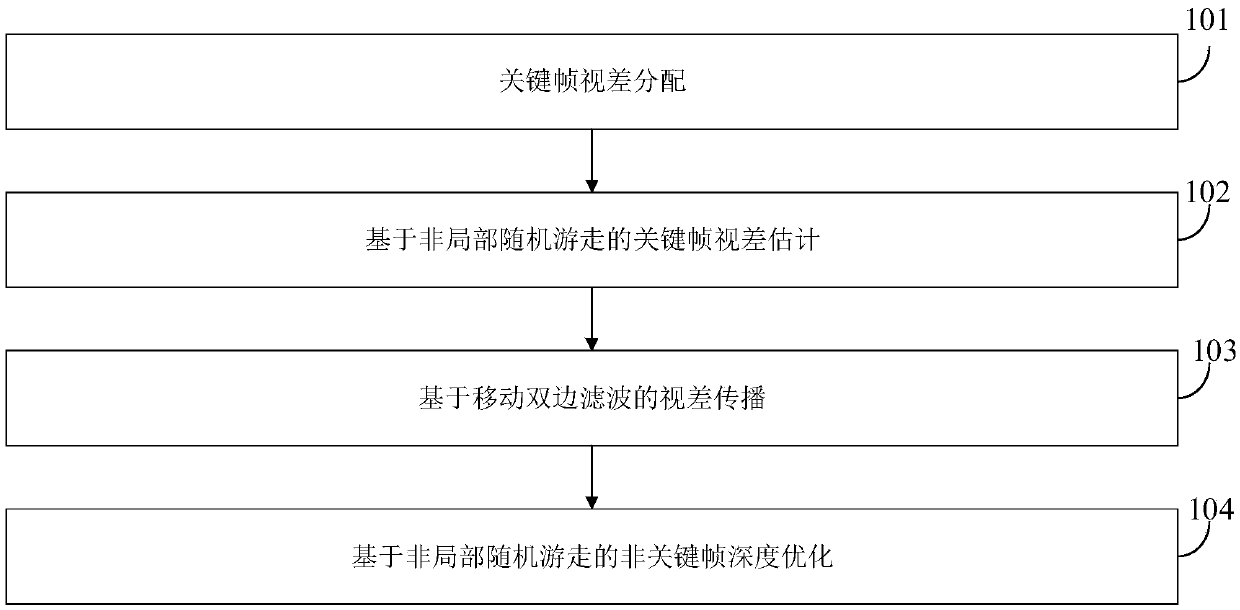
[0047] 1. Keyframe Parallax Assignment
[0048] The basic processing unit in the process of semi-automatic 2D to 3D conversion is a video sequence, that is, a series of image frames with continuous time and relatively little change in spatial objects. Usually the first and last frames of the video are marked as key frames, and the rest of the image frames are regarded as non-key frames. Manually mark the depth of keyframes, assign different disparity values to different objects in the input color keyframe image, and generate marked disparity curves, which are regarded as strokes marking clues as sparse disparity maps.
[0049] 2. Key frame disparity estimation based on non-local random walk
[0050] The marked curve strokes and the key frame color map are used as the input of the NRW algorithm, and the NRW algorithm is used to segment the image to obtain an image composed of objects with different disparity values, which is used as the disparity map of the key frame. The N...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More