

Variable-rigidity soft body driver, soft body arm and soft body platform based on blocking principle
A software driver, variable stiffness technology, applied in the field of robotics research, to achieve the effect of good environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
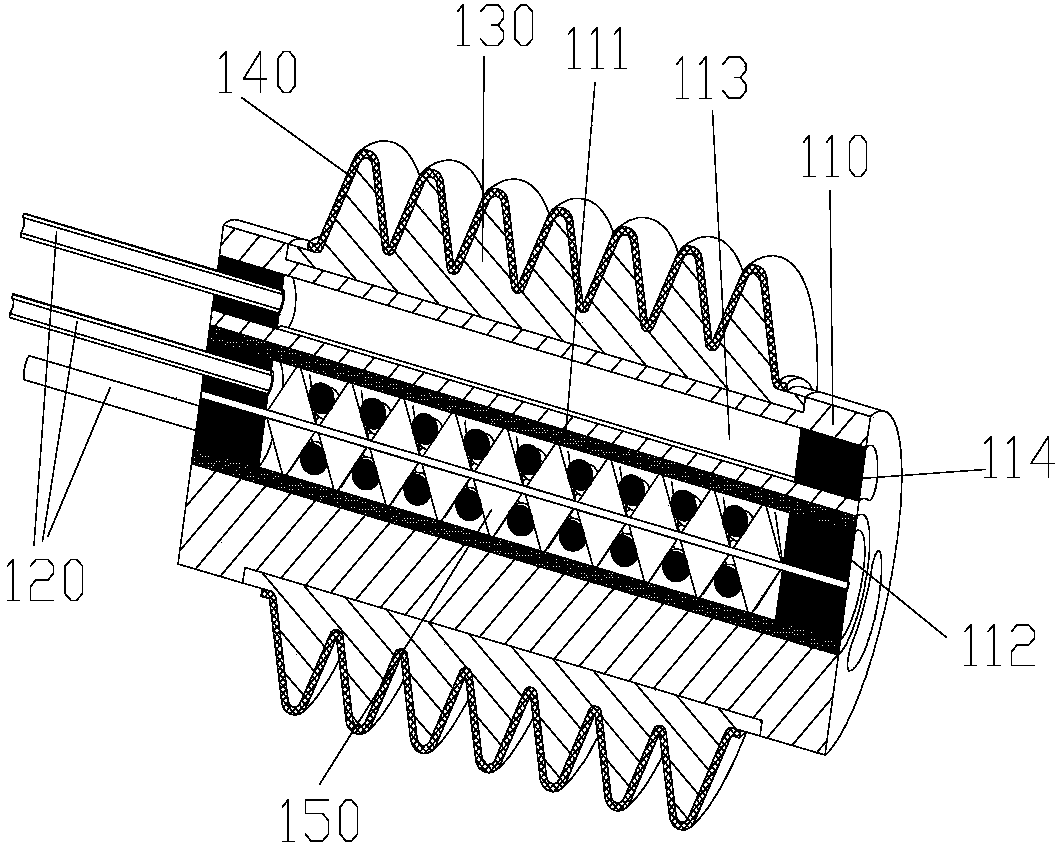
[0053] Such as Figure 1 to Figure 6 As shown, a variable stiffness soft actuator based on the clogging mechanism includes a vacuum pump 200 and a unit module 100 .
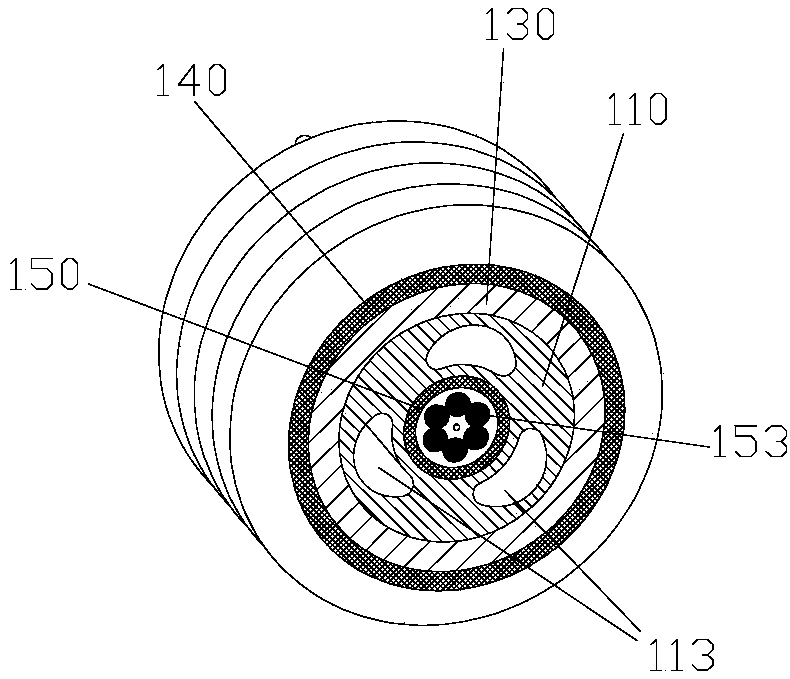
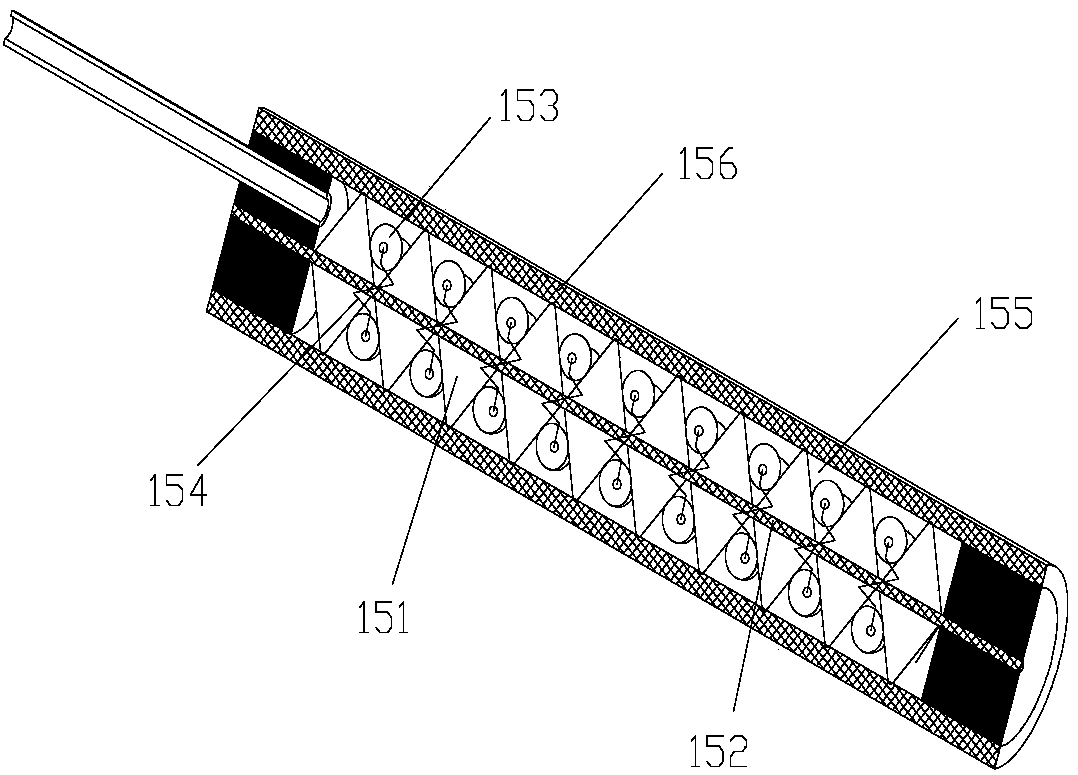
[0054] The unit module 100 includes an inner flexible skeleton 110 , a trachea 120 , an outer flexible layer 130 , a wrapping layer 140 , a plugging mechanism 150 , a deformable plug 114 and a plugging plug 112 .
[0055] The inner flexible frame has a central through hole 111, and several deformation holes 113 are evenly distributed along the circumferential direction on the inner flexible frame located on the outer periphery of the central through hole. The number of deformation holes in the present invention is preferably three.
[0056] The outer flexible layer covers the outer periphery of the inner flexible frame, preferably the outer flexible layer is f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More