

Variable stiffness lower limb external skeleton robot
An exoskeleton robot and variable stiffness technology, which is applied in the direction of manipulators, passive exercise equipment, program-controlled manipulators, etc., can solve the problems of low consistency of movement, heavy weight of the whole machine, and late start, so as to improve wearability, Improved consistency, enhanced comfort effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
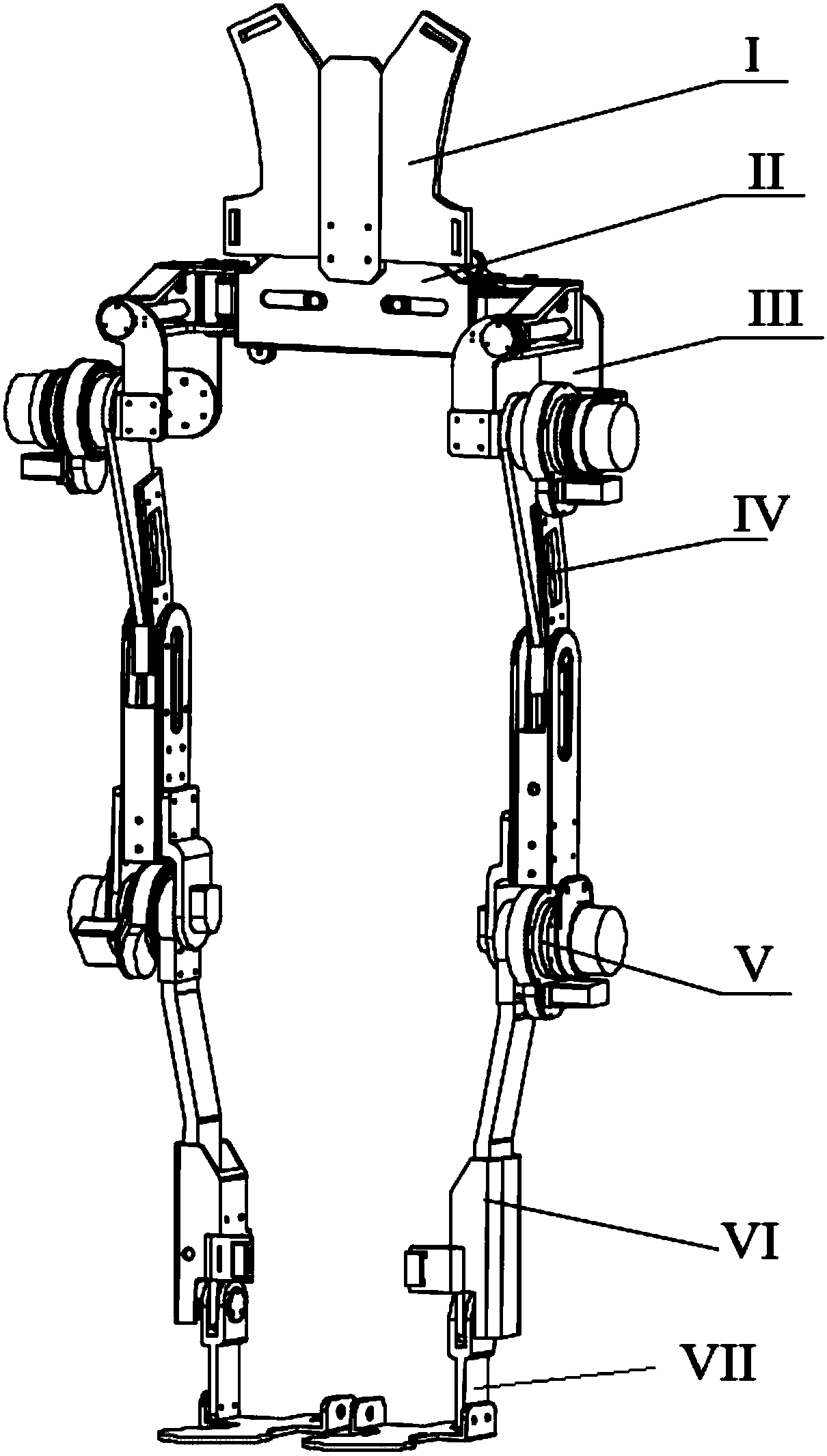
[0034] Such as figure 1 As shown, the lower extremity exoskeleton robot of the present invention includes a backboard I, a waist flexibility adjustment mechanism II, a hip joint mechanism III, a thigh IV, a knee joint mechanism V, a lower leg VI and an ankle joint mechanism VII.
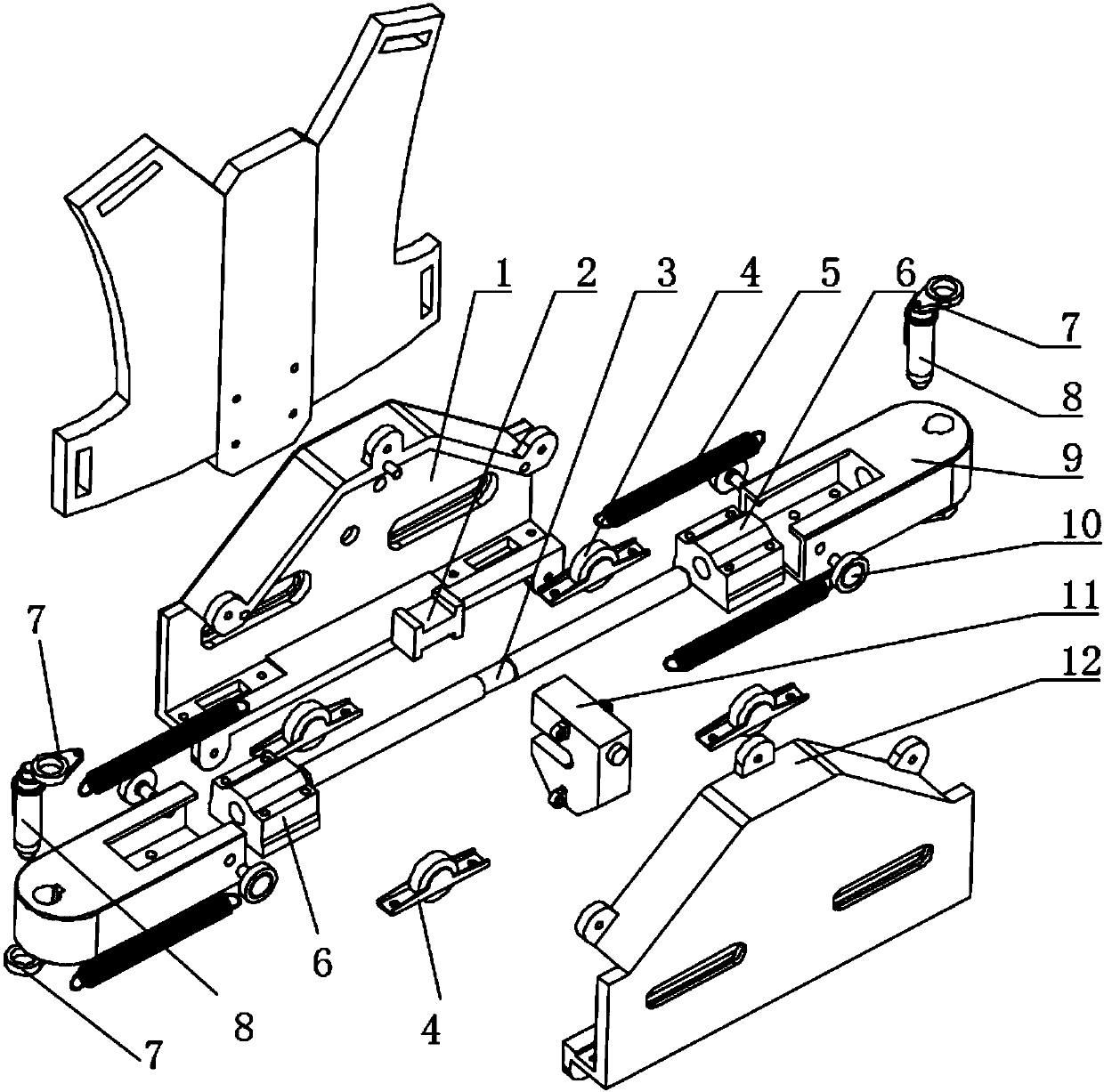
[0035] Such as figure 2As shown, the waist flexible adjustment mechanism II of the present invention includes a waist shell-1, an I-shaped block 2, a central shaft 3, a load-bearing pulley 4, an extension spring 5, a waist slider 6, a pull ring 7, and a hip joint installation shaft 8 , slider housing 9, limit pulley 10, U-shaped block ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More