

Unmanned automobile complex environment collision avoidance radar system based on combination waveforms and signal processing method
A technology for unmanned vehicles and complex environments, applied in the field of radar, it can solve the problems of poor all-weather work effect, large influence of ultrasonic weather conditions, and short detection distance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
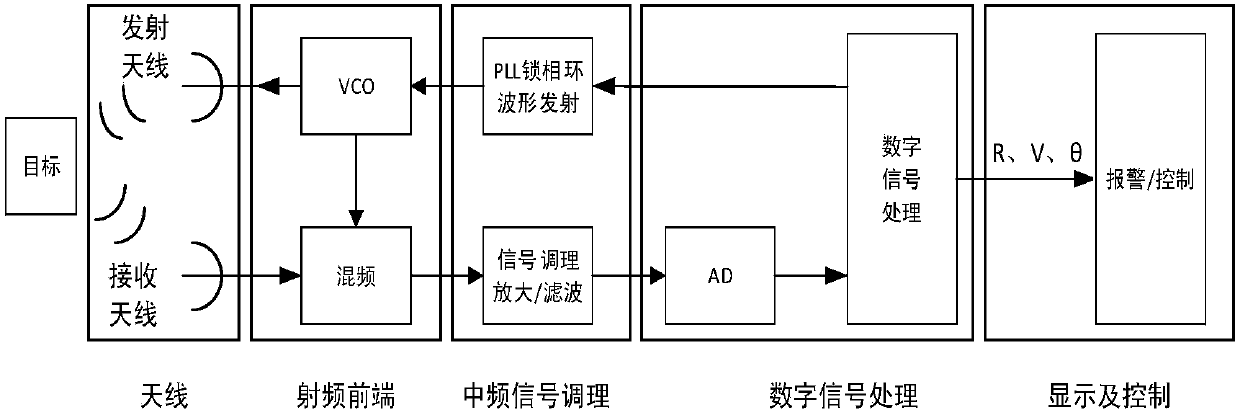
[0039] Embodiment 1: A long-distance complex environment collision avoidance millimeter-wave radar system for unmanned vehicles, including an antenna subsystem, a radio frequency subsystem, a signal conditioning subsystem, and a signal processing subsystem;
[0040] The antenna subsystem forms the transmitting and receiving beams required for radar detection, radiates the transmitting signal to the designated area, and receives the scattered echo signal of the target in the designated area;
[0041] The radio frequency subsystem generates a transmission signal and the frequency of the transmission signal changes according to the law of the modulation signal, so as to realize the output of linear frequency modulation continuous wave;
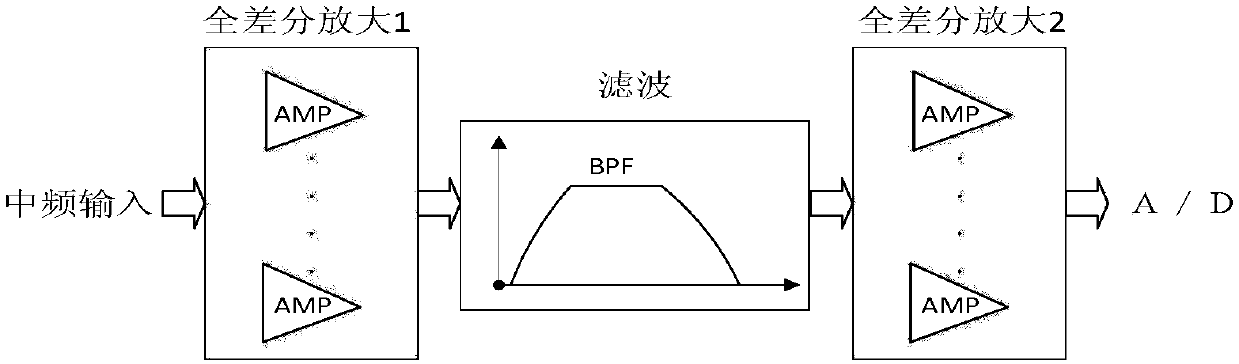
[0042] The signal conditioning subsystem is used to filter and amplify the amplitude of the intermediate frequency analog signal;
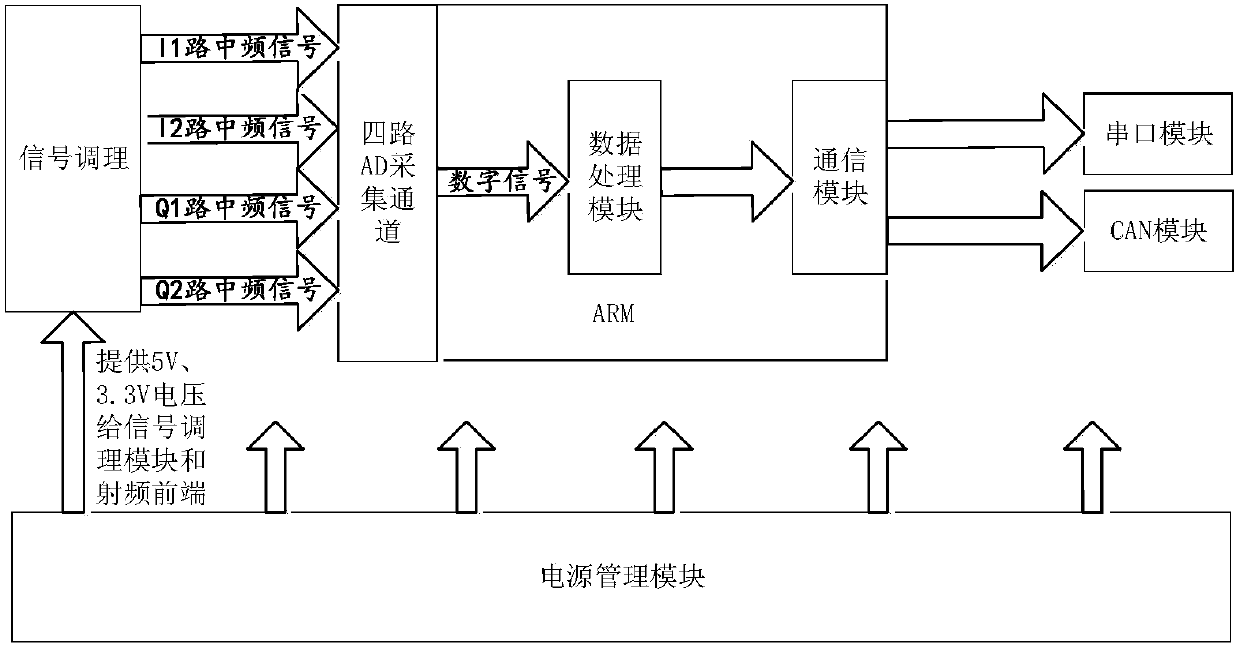
[0043] The signal processing subsystem enables the four-way I / Q intermediate frequency signals output by the signa...
Embodiment 2
[0047] Embodiment 2: the signal processing method of the complex environment anti-collision radar system of unmanned vehicles based on combined waveforms described in each scheme of embodiment 1, it is characterized in that, described combined waveforms are FMCW signals and constant frequency waves modulated by triangular waves The waveform formed by the combination of modulated CW signals, the first section is a triangle wave, and the second section is a constant frequency wave;
[0048] The signal processing method includes the following steps:
[0049] S1. For each segment of the waveform, the IQ data collected by the A / D is subjected to time-frequency FFT transformation, and the time domain data is converted into frequency data;
[0050] S2. Use the complex modulus value after the FFT transformation of each segment of the waveform as the threshold detection CFAR, output the position of the threshold point, calculate the corresponding frequency value according to the point ...
Embodiment 3
[0061] Embodiment 3: As a supplement to Embodiment 1, this embodiment mainly introduces the use of millimeter wave radar to realize the obstacle avoidance function of unmanned vehicles. Compared with other detection methods, millimeter-wave radar mainly has the advantages of stable detection performance, good environmental adaptation, small size, low price, and can be used in relatively severe rainy and snowy weather.
[0062] Aiming at the insufficient perception ability of unmanned vehicles to their driving environment, especially the lack of obstacle avoidance ability or lack of obstacle avoidance ability in complex environment, or the obstacle avoidance time is too short to avoid obstacles in time, resulting in unmanned vehicles Driving car collisions, resulting in damage to unmanned vehicles, etc., this embodiment provides a long-distance and complex environment anti-collision millimeter-wave radar system for unmanned vehicles. Obstacles, including static targets and dyna...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More