

Four-wheel drive steering control method and device
A technology of four-wheel drive and control method, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as poor driving effect, improve driving effect and avoid rollover , to meet the effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0026] The invention provides a control method for four-wheel drive steering, which specifically includes the following steps:
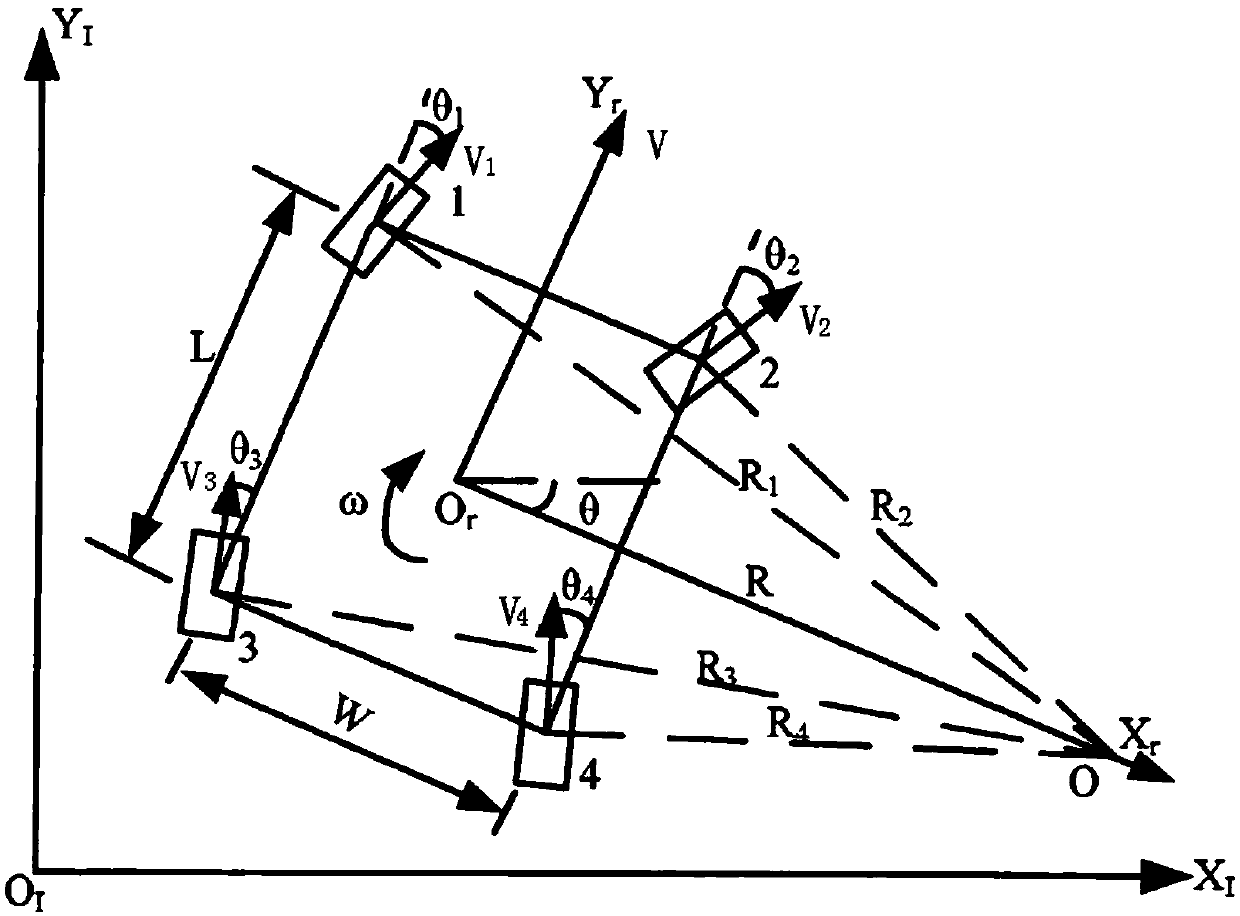
[0027] (1) According to the motion characteristics of the AGV car, the steering motion model is established.
[0028] The established steering motion model is as follows figure 1 As shown, the model interprets the movement of the AGV when turning. Among them, in X I o I Y I In the coordinate system, the rotation angles of the front outer drive wheel 1, the front inner drive wheel 2, the rear outer drive wheel 3, and the rear inner drive wheel 4 of the AGV car are θ 1 , θ 2 , θ 3 , θ 4 , corresponding to the turning radius of the driving wheel is R 1 , R 2 , R 3 , R 4 , the traveling speed is V 1 , V ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More