

Method and device for obtaining conversion parameters, and mobile mapping system
A technology for converting parameters and measuring systems, which is applied in the field of mobile mapping, and can solve problems such as difficult and cumbersome acquisition of high-precision initial conversion parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
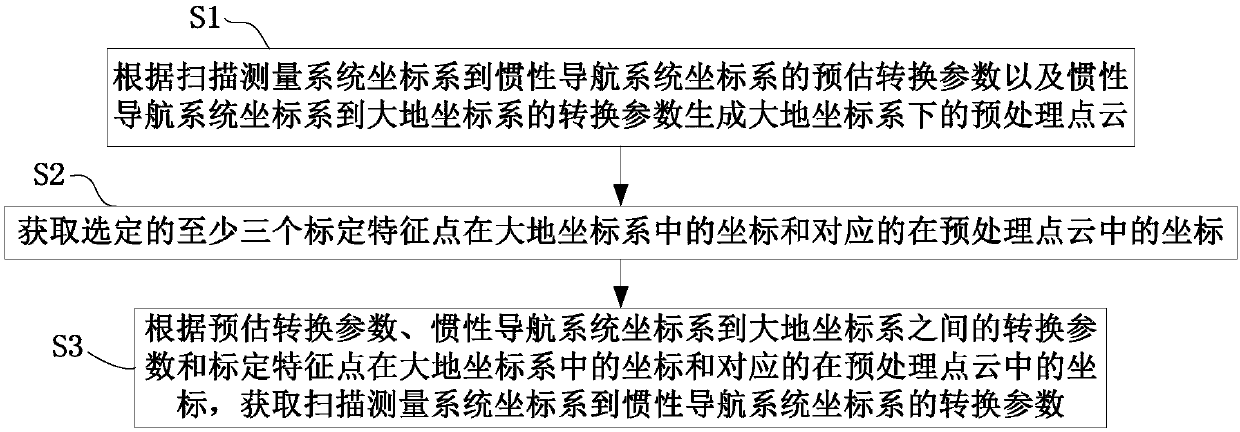
[0056] This embodiment provides a method for obtaining the conversion parameters from the coordinate system of the scanning measurement system to the coordinate system of the inertial navigation system, such as figure 1 shown, including:
[0057] S1. Generate a preprocessed point cloud in the geodetic coordinate system according to the estimated conversion parameters from the scanning measurement system coordinate system to the inertial navigation system coordinate system and the conversion parameters from the inertial navigation system coordinate system to the geodetic coordinate system. Preferably, the scanning measurement system can be a device with a scanning function such as a laser scanner (Laser), and the corresponding scanning measurement system coordinate system is the laser scanner coordinate system at this time; the inertial navigation system (INS) is based on a gyroscope and an accelerometer It is a navigation parameter calculation system for sensitive devices. The...
Embodiment 2
[0090] This embodiment provides a device for obtaining conversion parameters from the coordinate system of the scanning measurement system to the coordinate system of the inertial navigation system, such as Figure 5 shown, including:
[0091] The preprocessing point cloud generation unit 11 is used to generate the preprocessing under the earth coordinate system according to the estimated conversion parameters from the scanning measurement system coordinate system to the inertial navigation system coordinate system and the conversion parameters between the inertial navigation system coordinate system and the earth coordinate system point cloud. Preferably, the scanning measurement system is a laser scanner.
[0092] The corresponding coordinate generating unit 12 is configured to obtain the coordinates of the selected at least three calibration feature points in the earth coordinate system and the corresponding coordinates in the pre-processed point cloud.
[0093] The calcu...
Embodiment 3
[0110] This embodiment provides a mobile mapping system, including the device in Embodiment 2 for obtaining conversion parameters from the coordinate system of the scanning measurement system to the coordinate system of the inertial navigation system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More