

Adaptive vehicle following algorithm based on improved model prediction control
A predictive control and improved model technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems that affect the comfort and acceptance of passengers
Active Publication Date: 2018-03-16
UNIV OF SHANGHAI FOR SCI & TECH
View PDF7 Cites 39 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
This prediction is obviously inconsistent with the actual vehicl
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
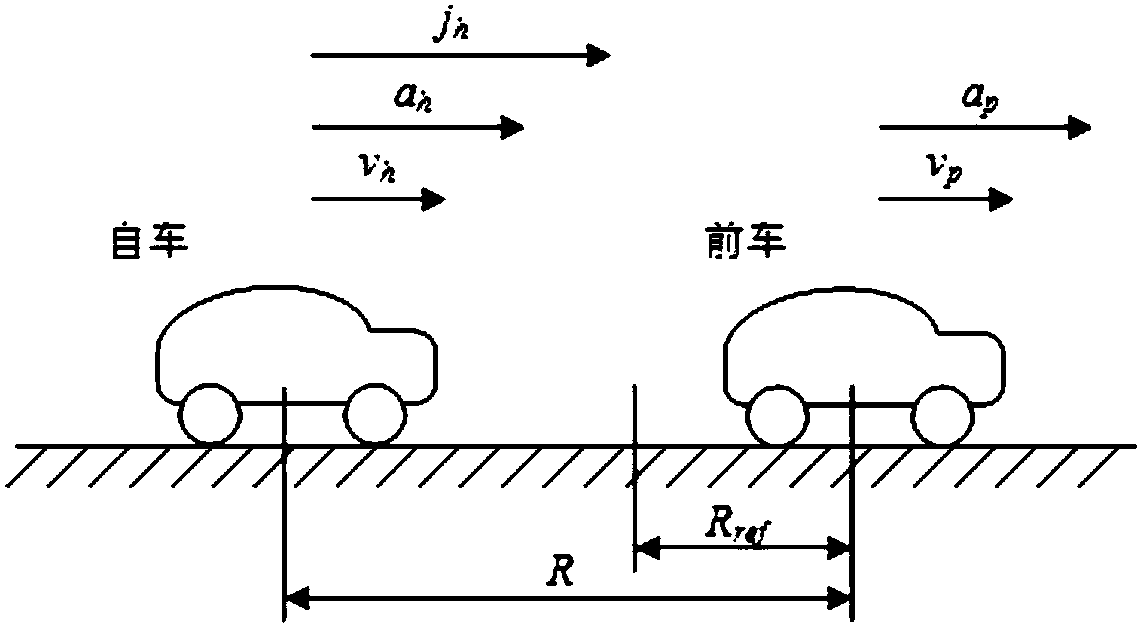
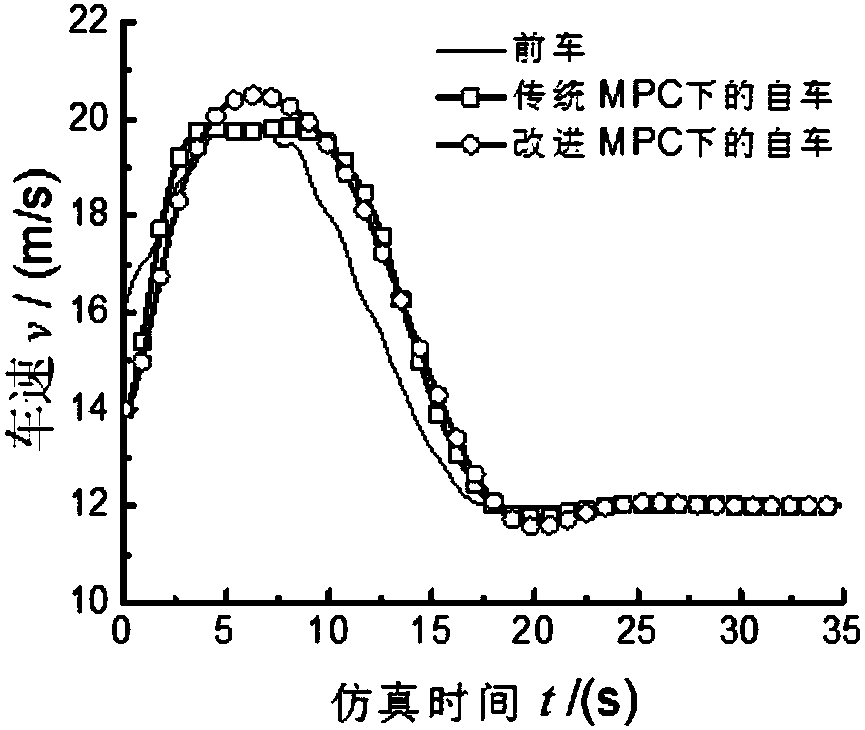
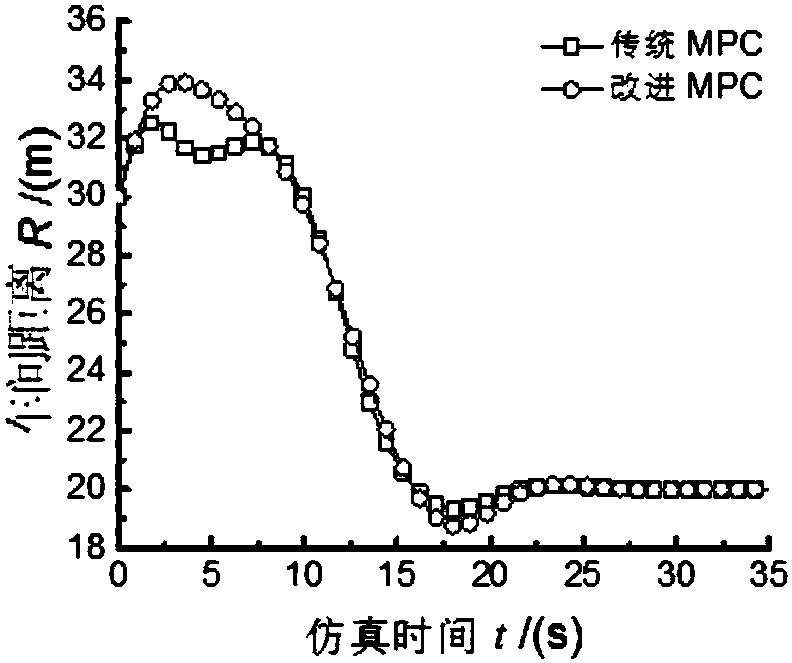
The invention relates to an adaptive vehicle following algorithm based on improved model prediction control. The algorithm comprises the steps that 1, a vehicle following model is established, whereina controller of an adaptive cruise control system is divided into an upper-layer controller and a lower-layer controller for control, the upper-layer controller calculates expected acceleration according to received information of a relative distance and a relative velocity and transmits the acceleration to the lower-layer controller, and the lower-layer controller controls throttle opening and brake pressure according to a vehicle inverse longitudinal dynamic model through the acceleration; and 2, an algorithm based on model prediction control is established, wherein an estimator is constructed, a least square method is adopted to fit out a most approximate straight line by use of values of previous moments, values of future moments are estimated, and finally a model prediction algorithmis utilized to calculate optimal expected acceleration. Under an existing model prediction framework, front vehicle acceleration information is collected, the least square method is utilized to fit out the front vehicle acceleration change law, prediction is made, a disturbed value of acceleration is provided for model prediction control, and therefore the effect of improving an optimal solutionis achieved.
Description
technical field [0001] The invention relates to an auxiliary driving system for automobile drivers, in particular to an adaptive cruise system, which belongs to the technical field of automobile driving adaptive cruise systems. Background technique [0002] Adaptive cruise system is a new generation of driver assistance system developed on the basis of traditional cruise control. It organically combines the car's cruise control system with the vehicle's forward collision warning system. Not only has all the functions of automatic cruise, but also can monitor the road traffic environment in front of the car through sensors such as on-board radar. Once it finds that there are other vehicles ahead of the current driving lane, it will Relative speed and other information, by controlling the accelerator and brake of the car to control the longitudinal speed of the vehicle, so that the vehicle and the vehicle in front maintain an appropriate safe distance. The adoption of this s...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G06F17/50B60W30/16G05B13/04
CPCB60W30/16G05B13/042G06F30/15G06F30/20G06F2111/06
Inventor孙涛龚戌伟戴旭彬王帅帅吕梦男
OwnerUNIV OF SHANGHAI FOR SCI & TECH