

A snake-like bionic robot based on flexible telescopic joints
A bionic robot and joint technology, applied in the field of bionic robots, can solve the problems of inability to expand and contract joints, difficult to simulate the motion posture of biological snakes, difficult to help humans, etc., and achieve the effects of easy steering, good flexibility and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
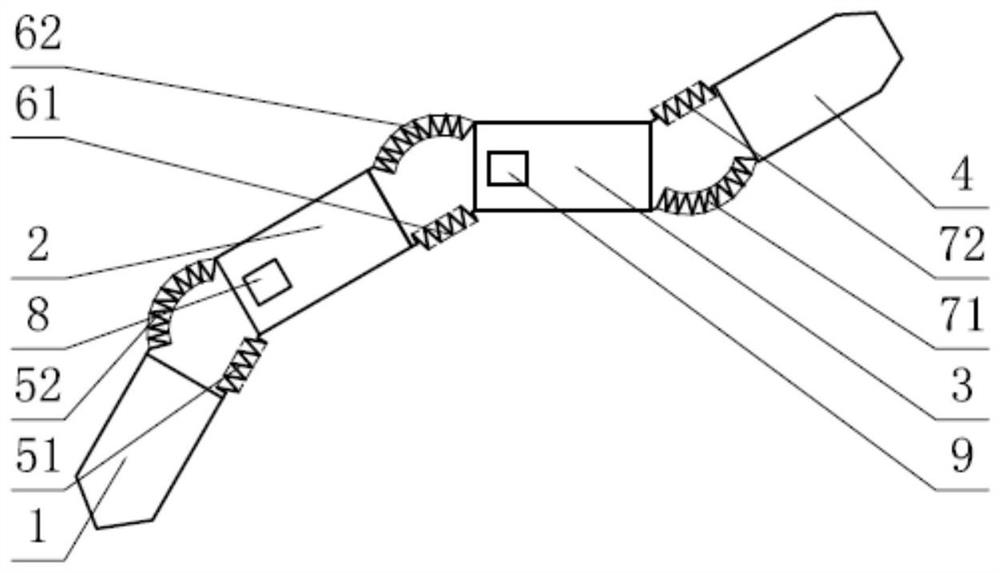
[0016] see figure 1 As shown, a kind of snake-shaped bionic robot based on flexible telescopic joints of the present invention comprises a robot snake head 1, a first snake body 2, a second snake body 3 and a robot snake tail 4, and the robot snake head 1 adopts the snake head joint and the first snake body 2 are connected, the first snake body 2 is connected with the second snake body 3 by snake body joints, and the second snake body 3 is connected with the machine snake tail 4 by snake tail joints.
[0017] see figure 1 As shown, the snake head joint includes a snake head joint spring A51 and a snake head joint spring B52; one end of the snake head joint spring A51 is connected to the left side of the rear end of the machine snake head 1, and the other end is connected to the left side of the front end of the first snake body 2; th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More