

Emergency obstacle avoiding system for automatic driving automobile
An automatic driving and automobile technology, applied in the field of automatic driving system, can solve the problems that affect the detection and judgment accuracy of the effective distance of the ranging operation, affect the flexibility and detection accuracy of the obstacle avoidance device, and the detection signal is easily interfered by the external environment, etc. Achieve good structural strength and structural adjustment flexibility, the ability to overcome interference in detection operations, and improve safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
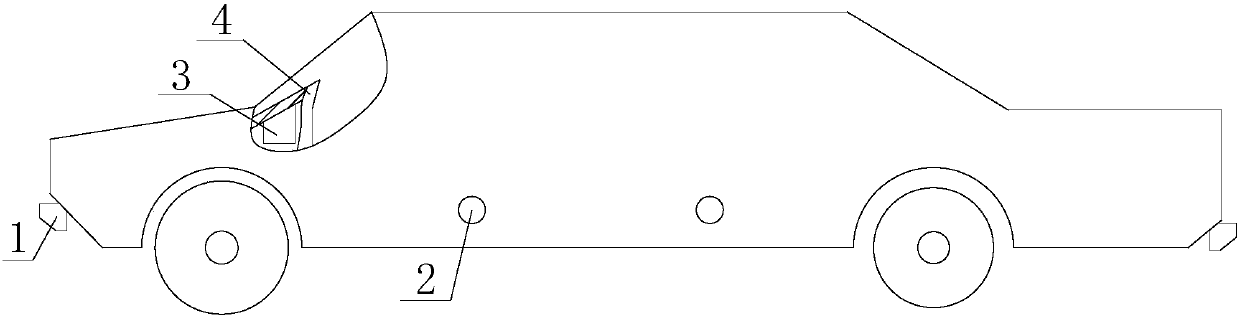
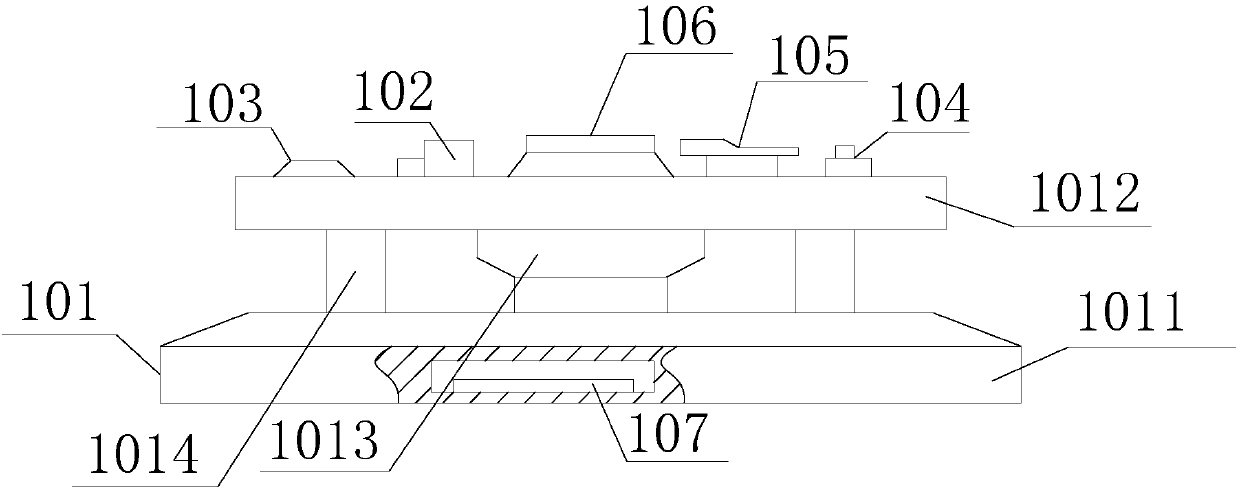
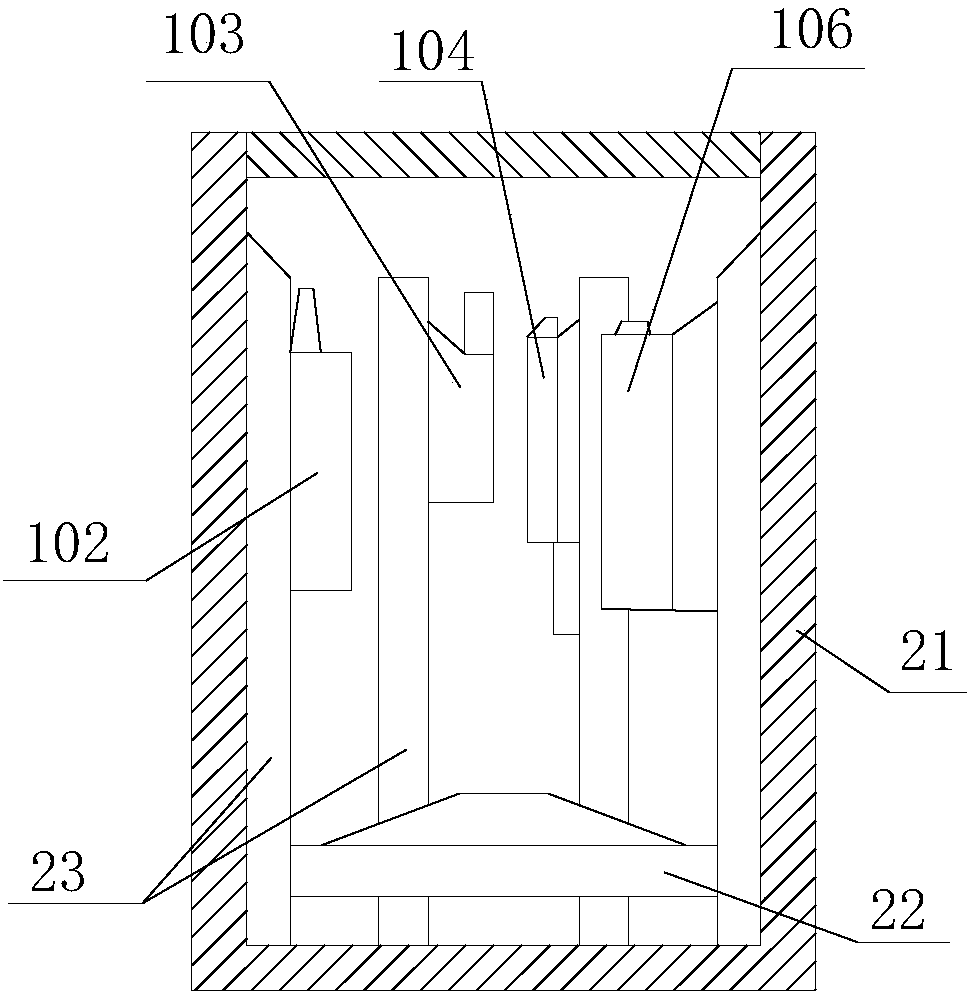
[0018] like figure 1 Shown in -3, a kind of emergency obstacle avoidance system for self-driving car, comprises main car exterior detection unit 1, auxiliary vehicle exterior detection unit 2 and in-vehicle control device 3, main vehicle exterior detection unit 1, auxiliary vehicle exterior detection unit 2 There are at least two of them, and they are respectively electrically connected to the control device 3 in the vehicle, wherein the main external detection unit 1 is evenly distributed on the front and rear end surfaces of the vehicle around the vehicle axis, and the auxiliary external detection units 2 are evenly distributed on the left and right sides of the vehicle around the vehicle axis On the outer surfaces of both sides, the axes of the main vehicle exterior detection unit 1 and the auxiliary vehicle exterior detection unit 2 form an included angle of 0°-90° with the horizontal plane. Electrical connections.
[0019] In this embodiment, the main vehicle external de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More