

Creeping speed control method for electric vehicle
A technology of electric vehicle and vehicle speed control, which is applied in the direction of control devices, vehicle components, and driver input parameters, and can solve problems such as inaccurate calculation of anti-slope torque, reduced robustness, and increased cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0148] The present invention is described in detail below in conjunction with accompanying drawing:
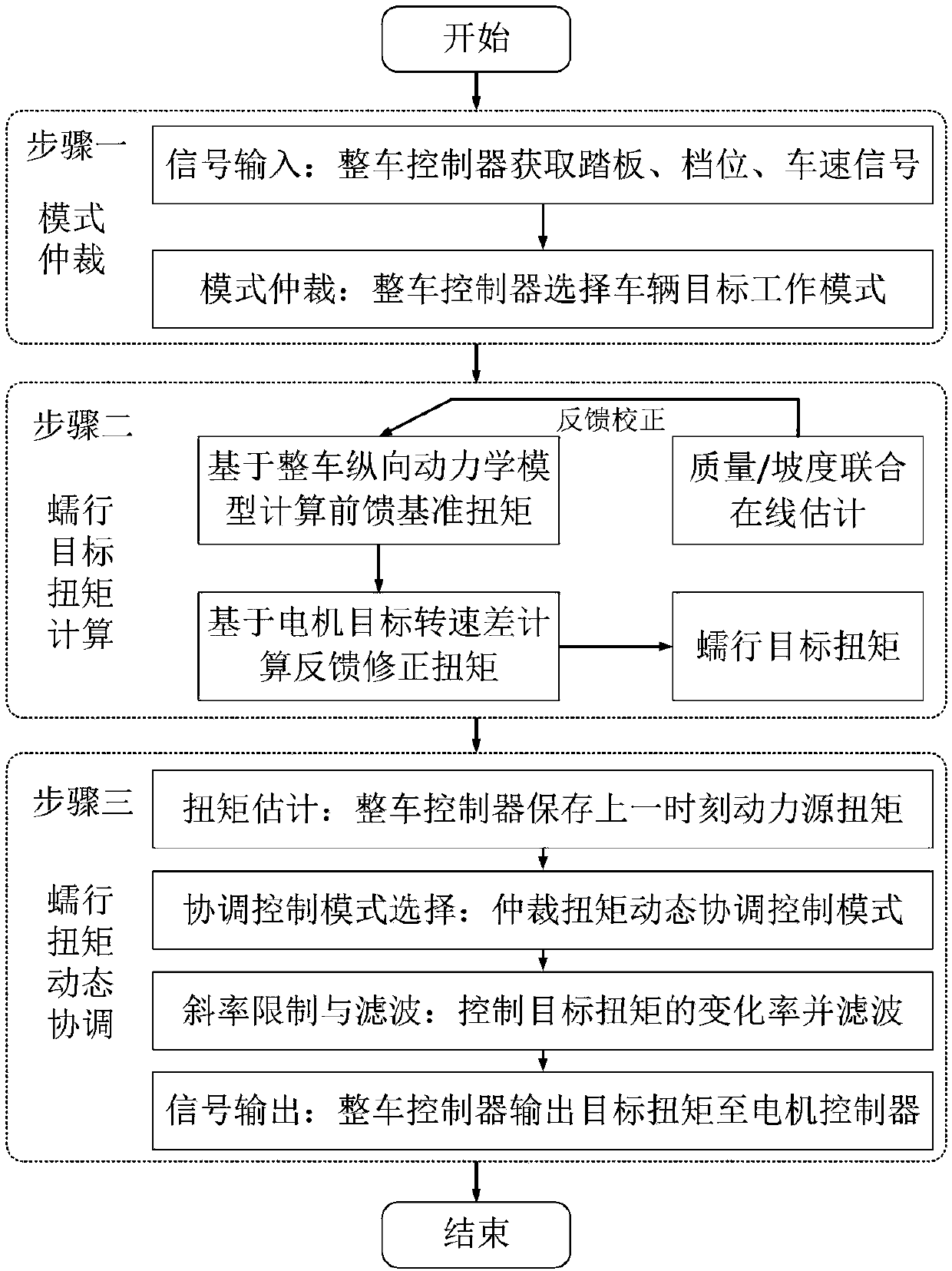
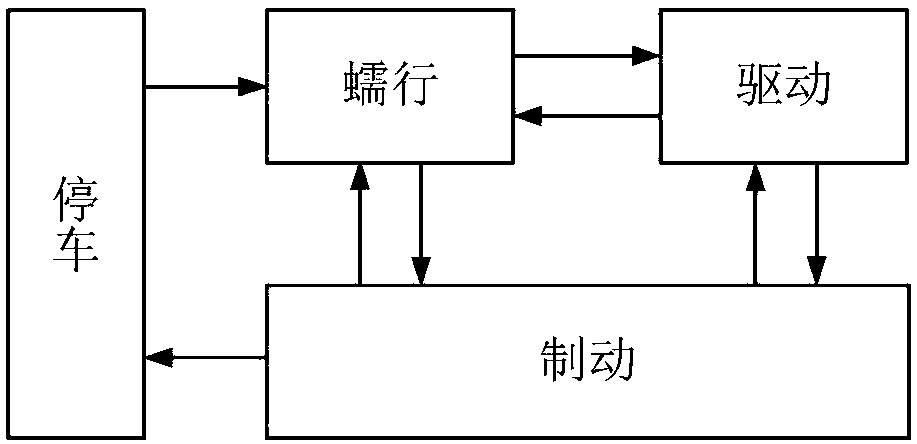
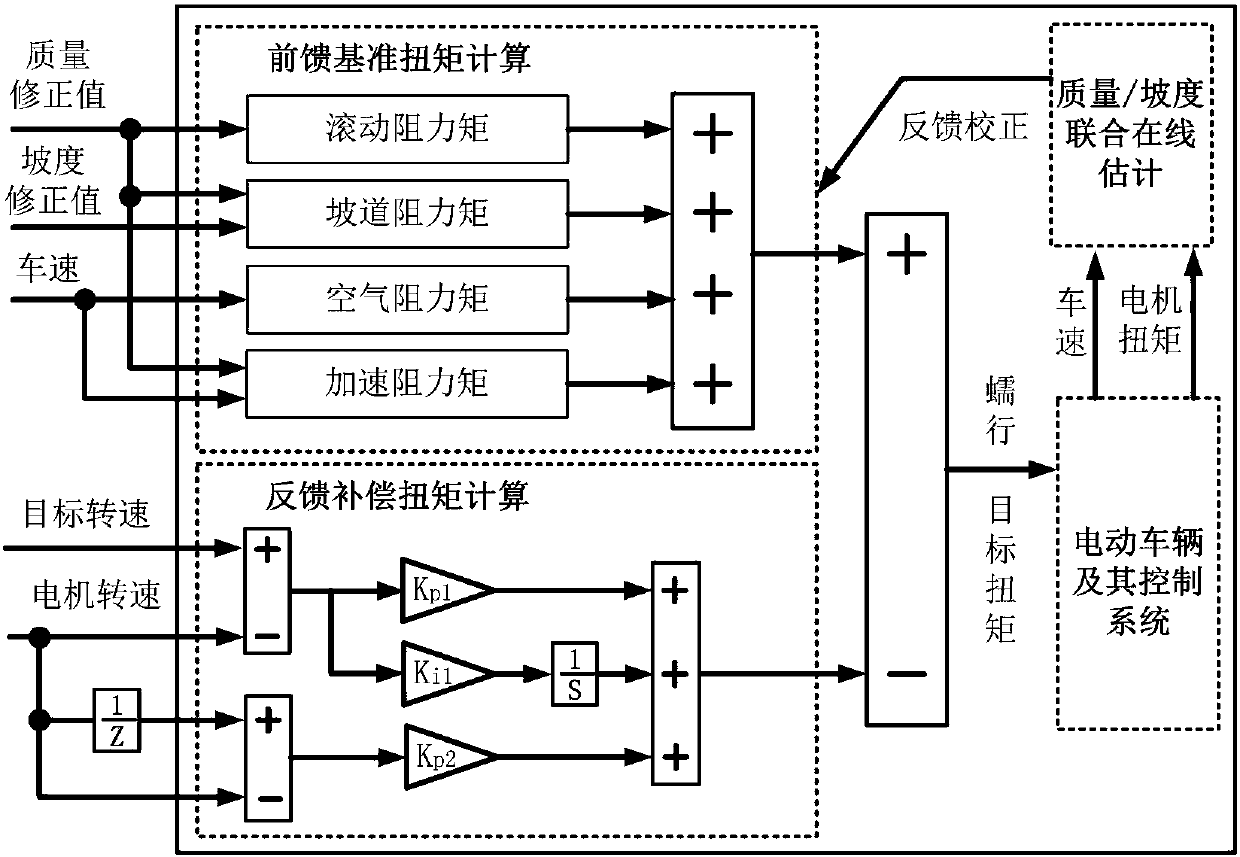
[0149] refer to figure 1 , the electric vehicle creeping speed control method of the present invention comprises three steps: step one is the arbitration of the working mode of the electric vehicle, and the vehicle controller collects the driver's accelerator pedal, brake pedal, handbrake, gear position and vehicle speed signal , and then judge the current vehicle state, and select the target operating mode of the electric vehicle; Step 2 is the calculation of the electric vehicle creep target torque, and further calculate the vehicle creep driving torque requirement according to the vehicle target operating mode selected by the vehicle controller in step 1 ; Step 3 is the dynamic coordination control of creep torque. The vehicle controller performs creep torque limitation and filtering based on the creep target torque calculated in the above step 2 and the output torque of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More