

Soft manipulator with elastic web structures between fingers
A technology of manipulators and soft fingers, applied in the field of manipulators, can solve problems such as unstable gripping and easy slipping, and achieve the effects of increasing positioning error tolerance, preventing slipping, and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings.
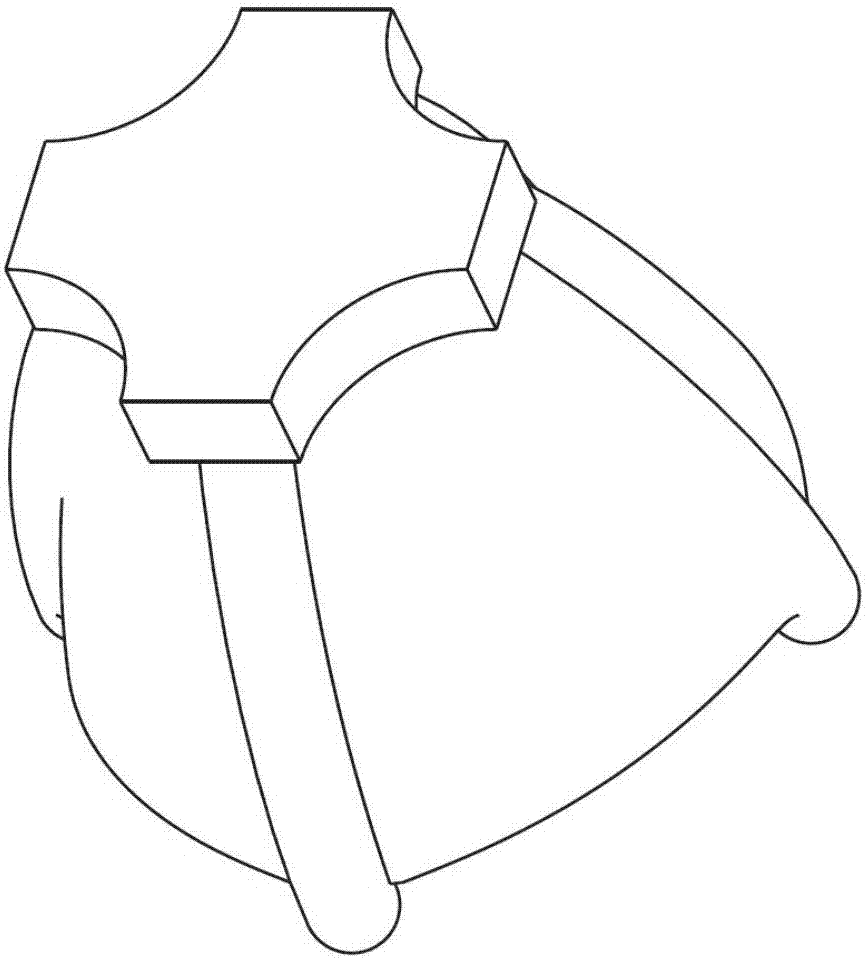
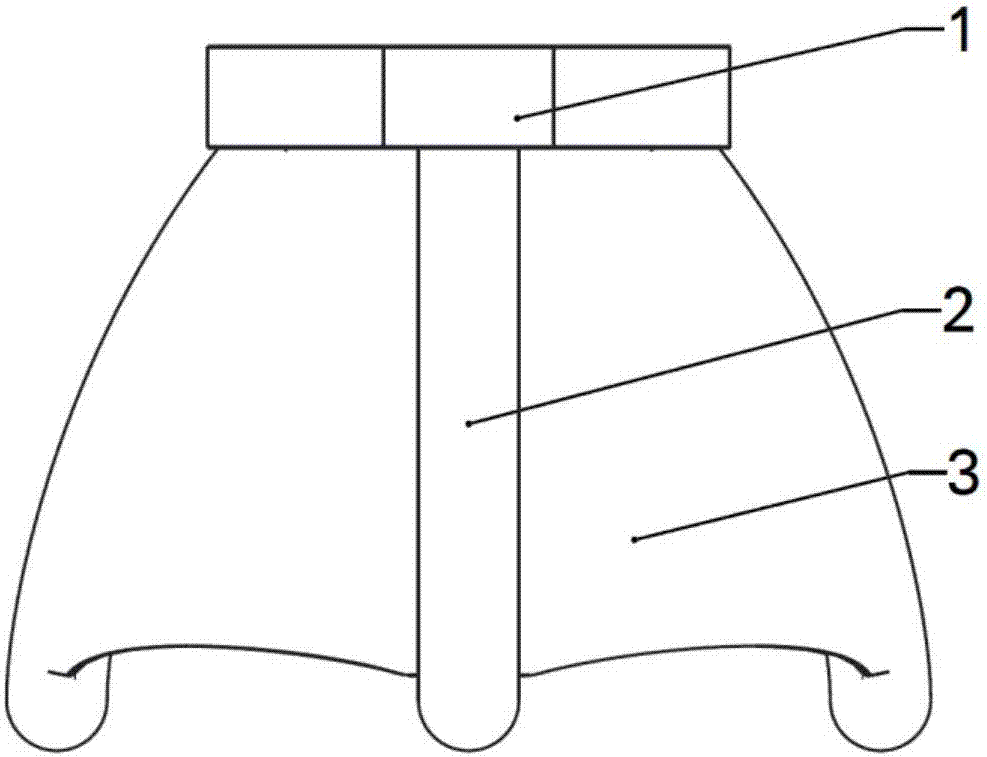
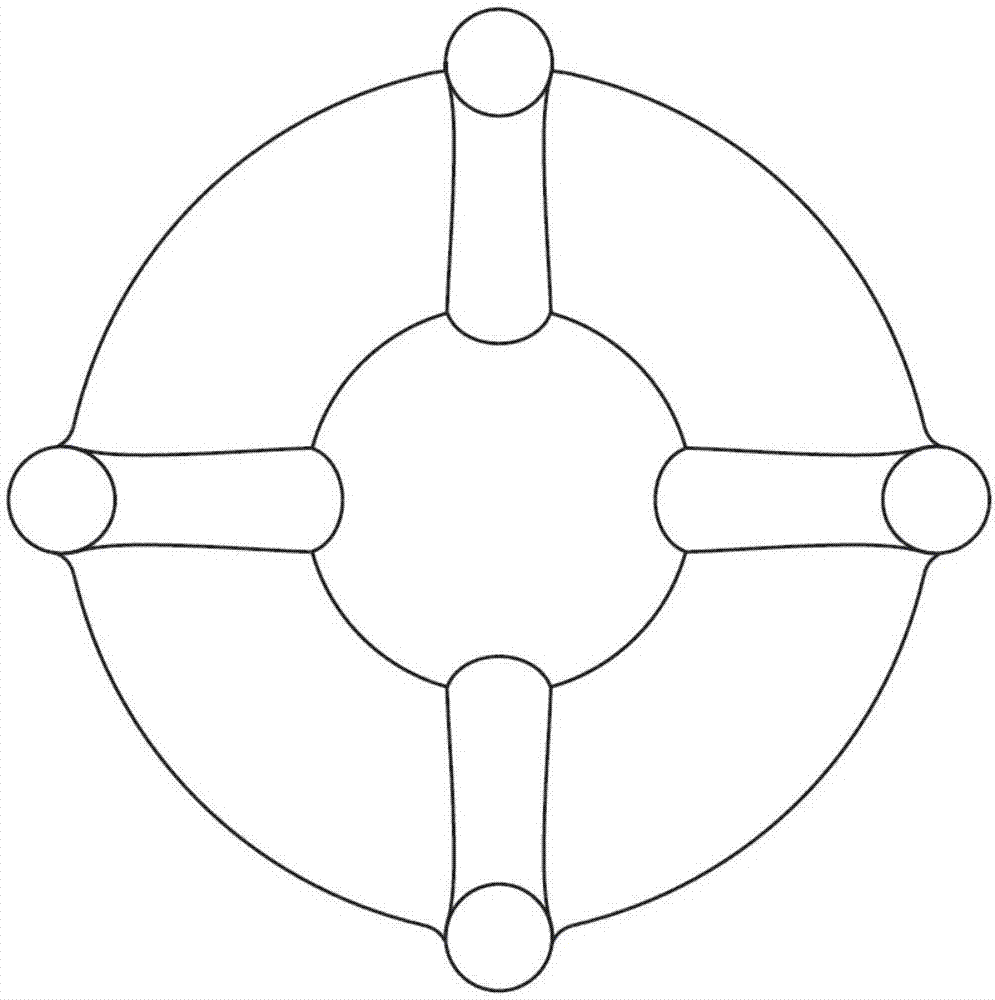
[0015] refer to Figure 1~6 , a soft manipulator with an elastic web structure between fingers, comprising a fixed palm 1 and soft fingers 2, the soft fingers 2 are connected to the fixed palm 1, and adjacent soft fingers 2 are connected by elastic webs 3.
[0016] Further, four soft fingers 2 are provided, and the four soft fingers are evenly distributed on the fixed palm 1 .
[0017] In this embodiment, the elastic webs between the soft fingers 2 are made of soft materials and have a certain tension and elasticity. When the driving fingers open outward, the elastic webs 3 will also open under the action of tension. When the driving fingers grasp inward When holding an item, the item is wrapped by the elastic web 3, which can prevent the item from slipping between the two fingers. When grasping an item with a large mass, the elastic web 3 can also provide a part of f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More