

Finite time neural network optimization method for solving inverse kinematics of redundant manipulator
A technology with limited time and optimization method, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., it can solve the problems of low precision, unable to achieve limited time convergence, etc., and achieve the effect of improving calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings.
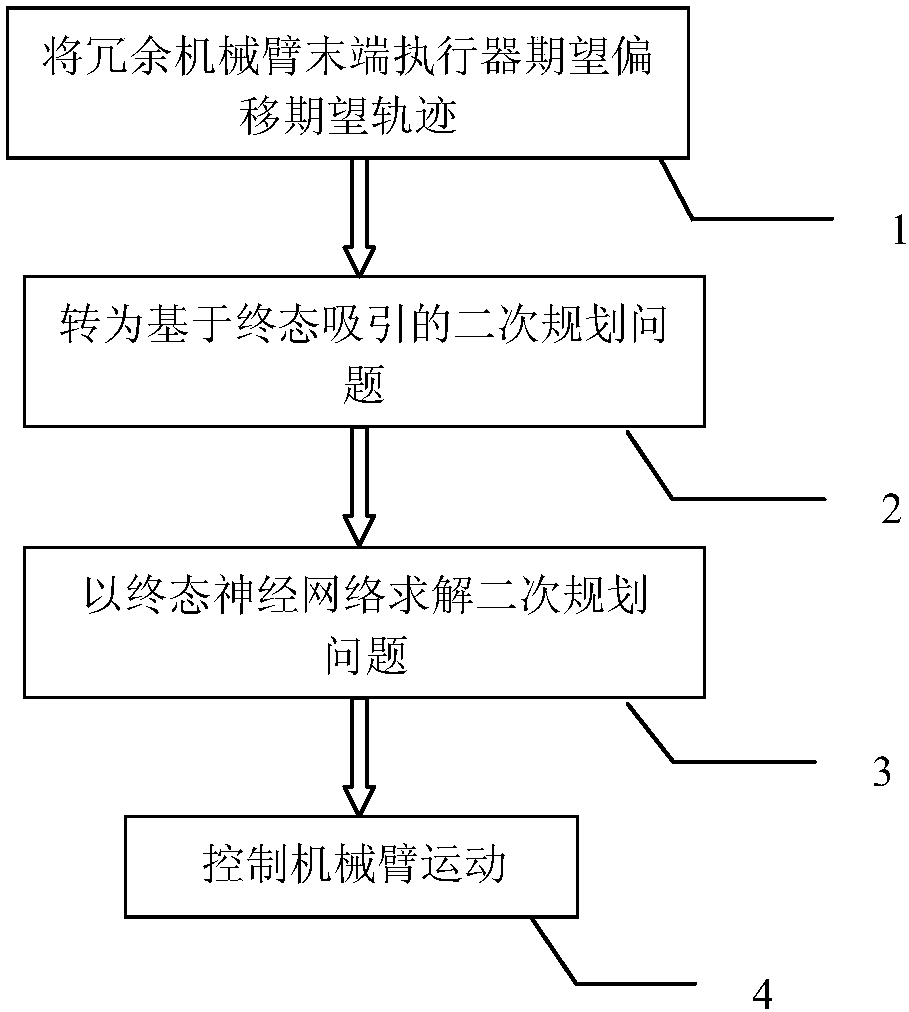
[0043] refer to Figure 1 to Figure 5 , a finite-time optimization method for solving the inverse kinematics of redundant manipulators, which consists of the following four steps: 1. Determine the expected target trajectory of the end-effector of the redundant manipulator and the expected return angle of each joint; 2. Establish a final state with The quadratic programming scheme for repeated motion of redundant manipulators that attracts optimization indicators 3. Solve the quadratic programming problem with a finite value final state neural network to obtain the angular trajectory of each joint. 4. Drive the motor to run with the result obtained from the solution, so that the robot arm can complete the trajectory task.
[0044] Step 1. Determine desired trajectory
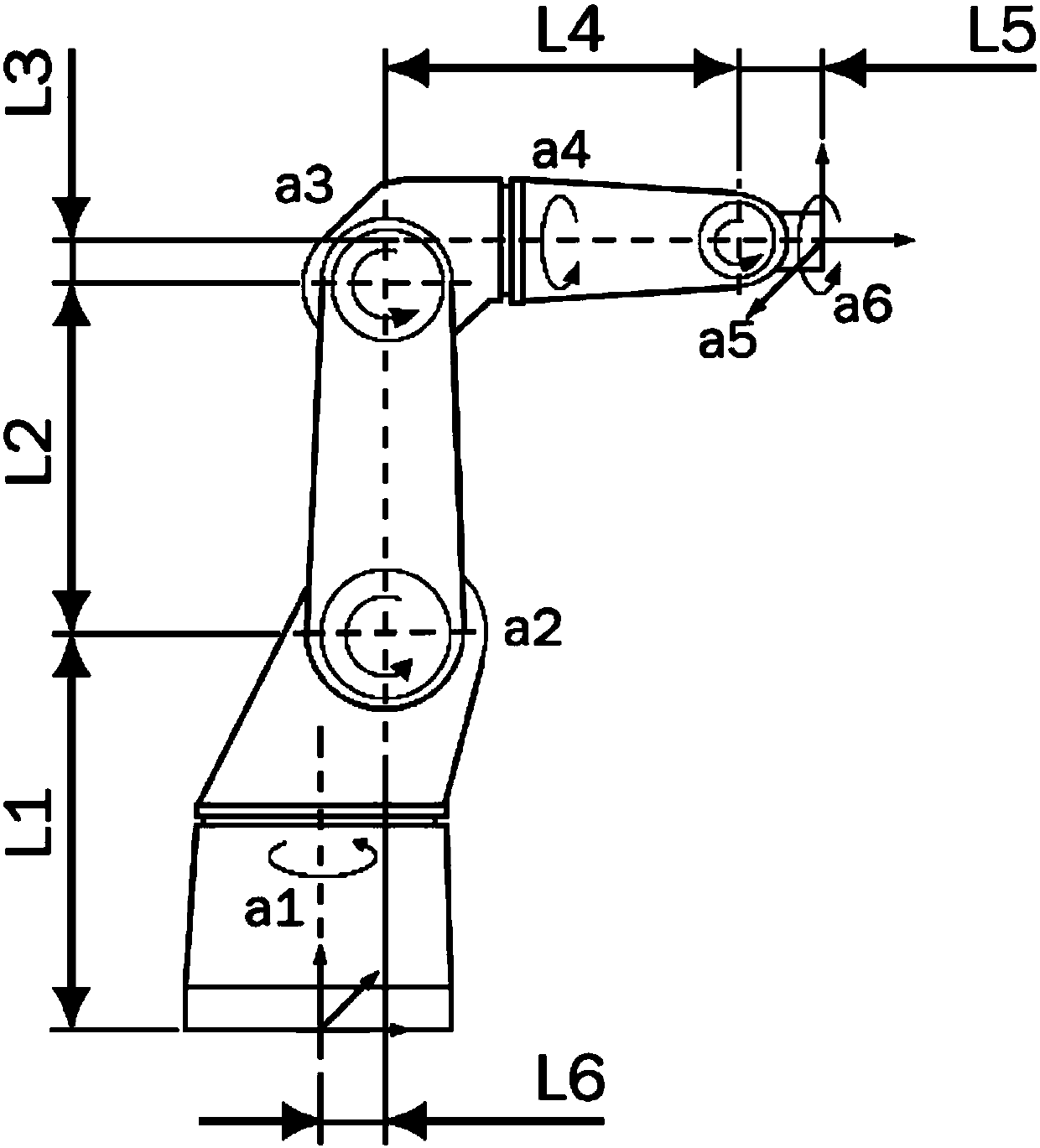
[0045] Set the joint angle that the redundant robotic arm ER6B-C60 expects to return to
[0046] Se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More