

Locus generation apparatus, control method for locus generation apparatus, and storage medium
A trajectory generation and trajectory technology, applied in the direction of torque/mechanical power control, program control, digital control, etc., can solve the problems of unable to handle heavy goods, not increasing the motor, shortening the driving time, etc., and achieve peak suppression , The effect of increasing the handling weight and shortening the handling time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
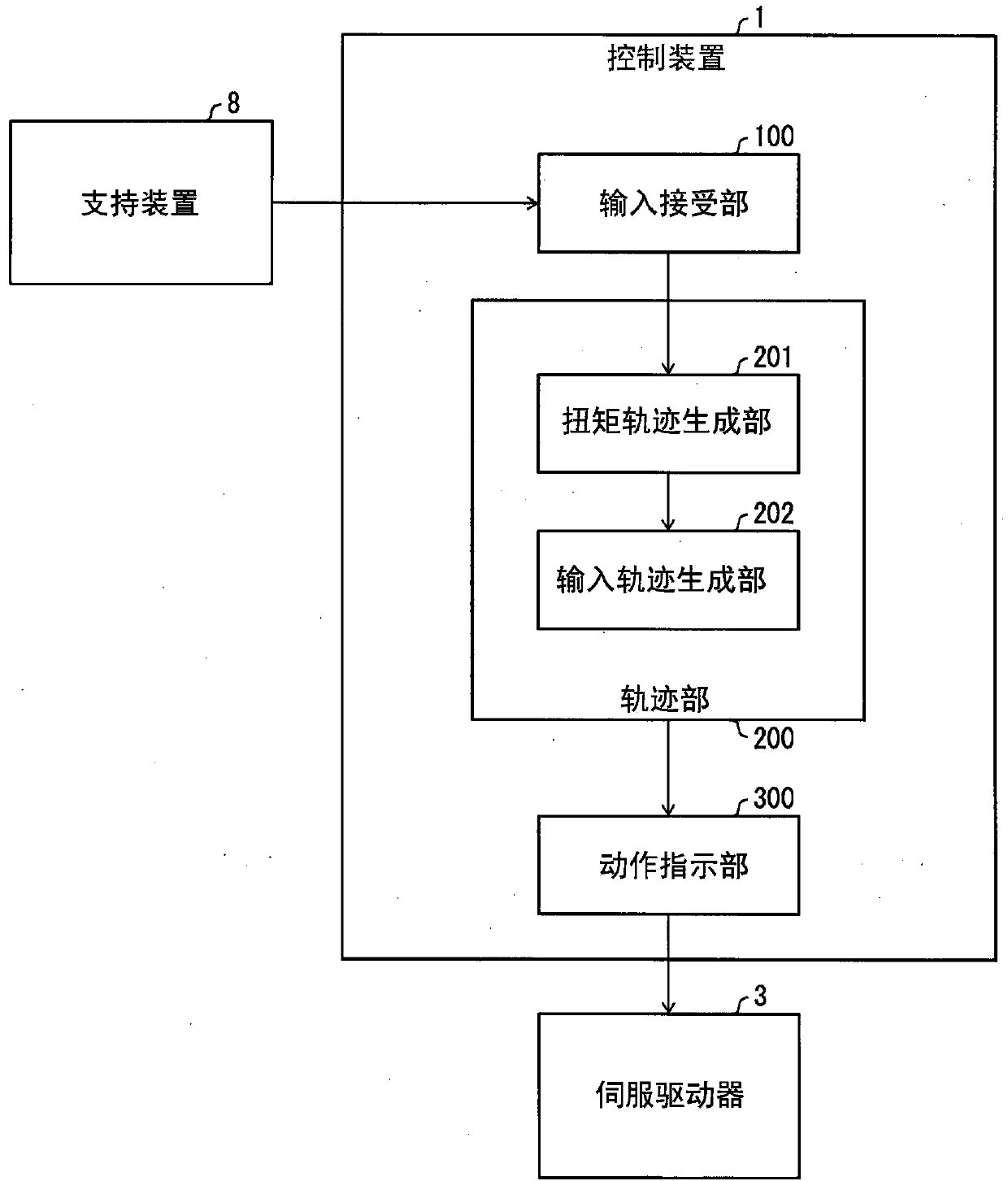
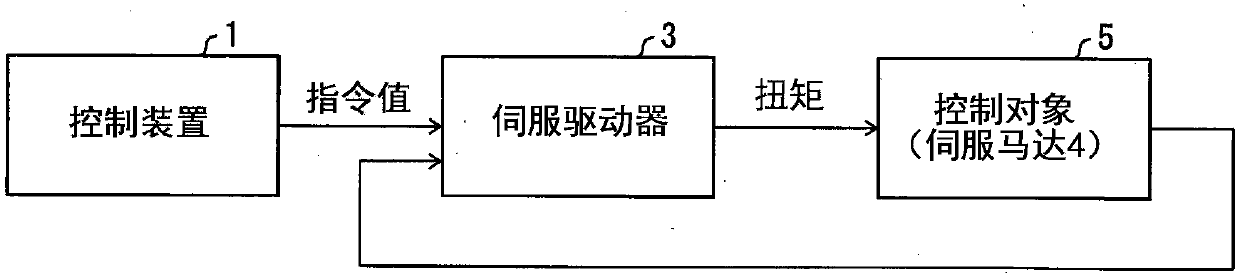
[0071] Hereinafter, embodiments of the present invention will be described in detail. The control system of this embodiment is a system in which the control device (and figure 2 The control object (corresponding to the control device 1 in the etc.) is generated in the figure 2 Corresponding to the control object 5 in etc.) at the target time (terminal time) to move to the input trajectory of the target position (specified position, terminal position), and input to the servo driver (with figure 2 Corresponding to the servo driver 3 in etc.), drive the servo motor (with figure 2 Corresponding to the servo motor 4 in etc.) to move the controlled object.
[0072] In addition, the input trajectory generated in the control device can control the peak torque. Furthermore, by controlling the peak value of the torque, if the drive device is the same as the drive device corresponding to the peak value in the conventional structure, the conveyance weight can be increased compared ...
Embodiment approach 2
[0114] based on Figure 7 , Figure 8 Other embodiments of the present invention will be described in detail as follows. In addition, for convenience of description, the same reference numerals are attached to components having the same functions as those described in the above-mentioned embodiments, and their descriptions are omitted.
[0115] [summary]
[0116] In Embodiment 1, the torque trajectory is obtained by setting the torque value and switching time as the input trajectory. However, in an actual device, due to the occurrence of model errors, the controlled object may not reach the terminal position and not reach the terminal speed at the terminal time even if the control is performed with a torque that conforms to the command.
[0117] Specifically, refer to Figure 7 Be explained. Figure 7 It is a diagram showing the relationship between the torque trajectory, the actual position of the control object, and time when the torque trajectory is used as the input t...
Embodiment approach 3
[0127] based on Figure 9 ~ Figure 14 Other embodiments of the present invention will be described in detail as follows. In addition, for convenience of description, components having the same functions as those described in the above-described embodiments are assigned the same reference numerals, and descriptions thereof are omitted.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More