
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Air dropping type robot
A technology of robots and racks, applied in the field of robots, can solve the problems of untimely deployment, large use restrictions, and the inability of search and rescue robots to perform airdrops, etc., and achieve the effect of convenient deployment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
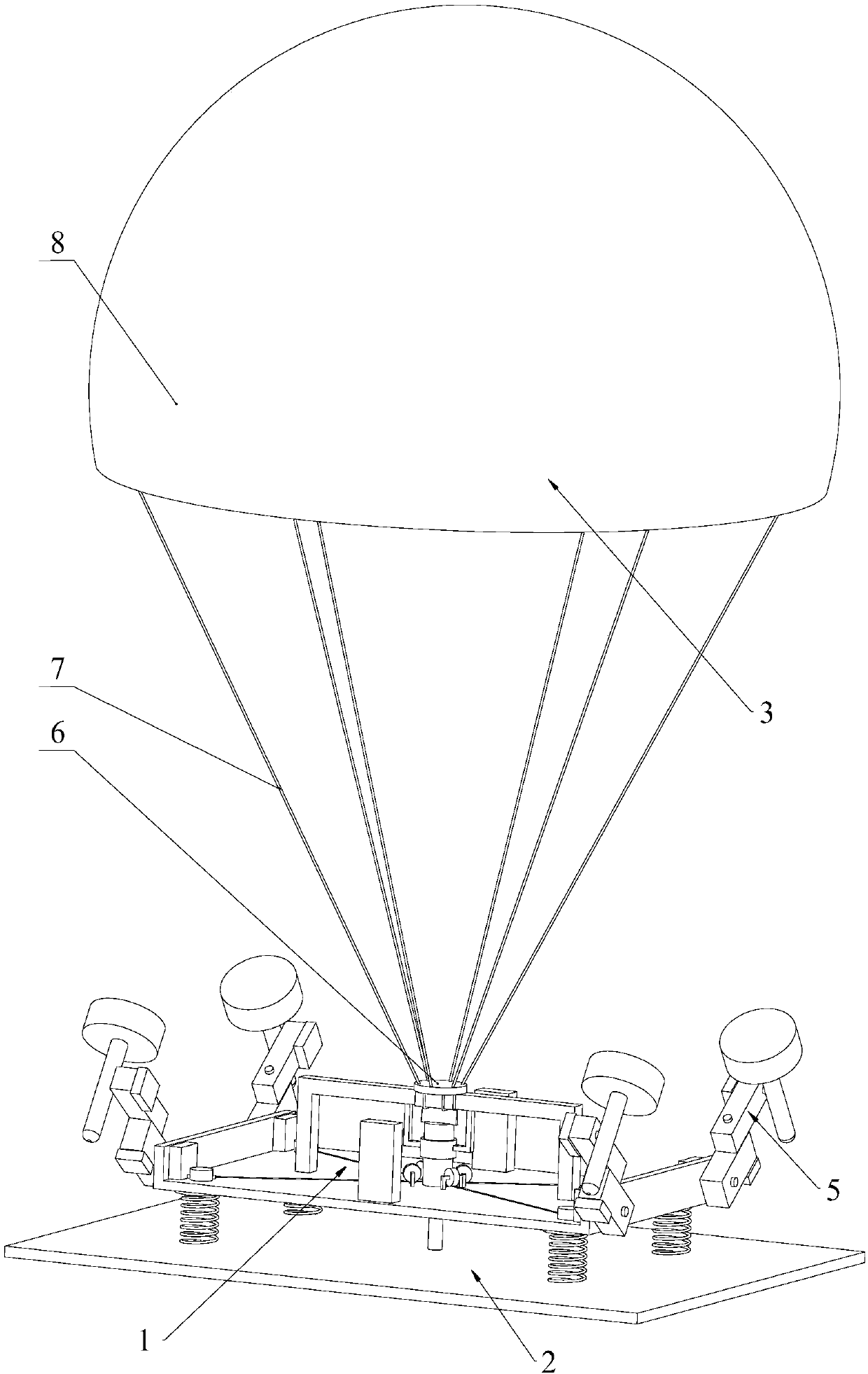
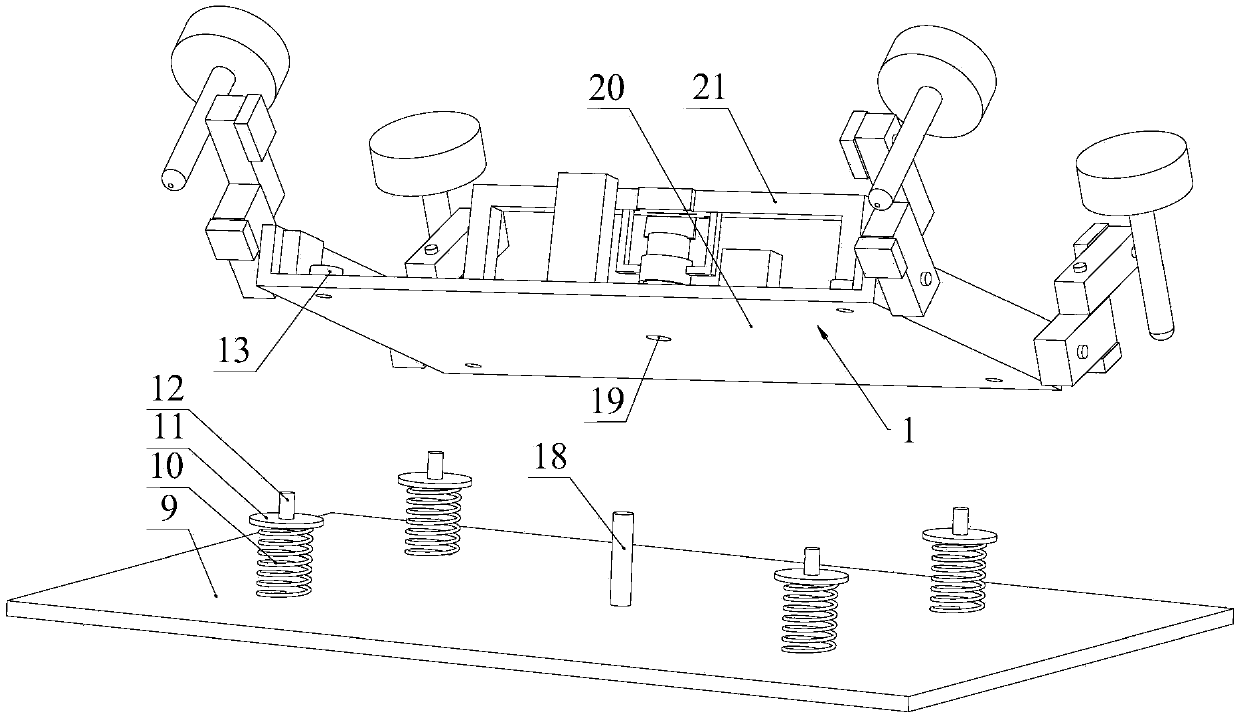
[0045] like figure 1 , 2 As shown in and 3, the present embodiment discloses a robot, which is also called a search and rescue robot or an airdrop robot, including a frame 1, a search and rescue device 26 installed on the frame 1, and four devices respectively installed on the frame 1. The walking foot 5 on the corner, the walking foot 5 includes the flying blower fan 36.
[0046] The search and rescue robot can walk by setting the walking foot 5, and by setting the flying fan 36 on the walking foot 5, the search and rescue robot can perform short-term flight over obstacles when encountering an obstacle that cannot be overcome. The search and rescue robot has various motion forms and strong applicability .
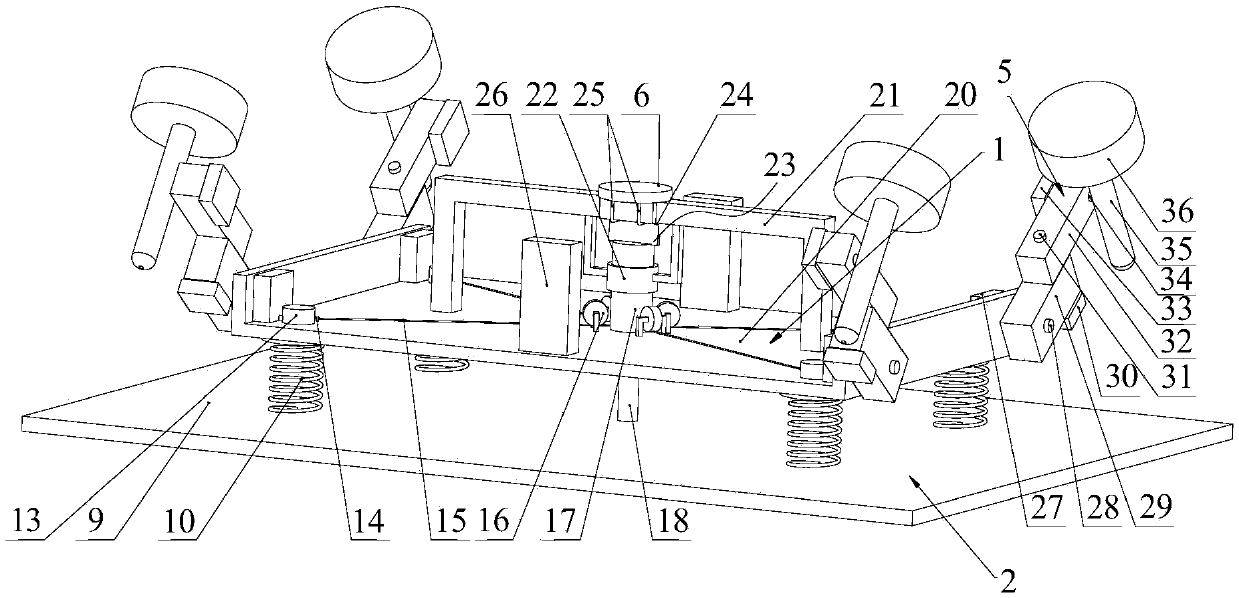
[0047] like figure 2 Shown, in the present embodiment, walking foot 5 also includes:
[0048] The first rotating electrical machine 27 is installed on the frame 1;
[0049] The first movable rod 29, the first end of the first movable rod 29 is fixed to the output sha...
Embodiment 2
[0077] This embodiment discloses an air-dropped disaster search and rescue robot. like Figure 7 , 8 Shown in and 9, the difference between the robot of the present embodiment and embodiment 1 is that the robot of the present embodiment also includes the disengagement rocket 4 installed on the top of the parachute 3 umbrella surface 8, and the separation mechanism is different from the embodiment 1 in addition, the present embodiment The separation mechanism can not only cut off the connection relationship between the parachute 3 and the frame 1, but also can trigger the work of breaking away from the rocket 4.
[0078] like Figure 7 , 8 As shown in and 9, in this embodiment, in order to enable the separation mechanism to trigger the work of the rocket 4, the cutting groove 40 of the crossbeam 21 of this embodiment runs through the crossbeam 21, and a control circuit is installed on the mounting plate 6 of this embodiment to control The circuit is connected with the detac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com