

Three-degree-of-passive-freedom exoskeleton ankle joint mechanism
An ankle joint and degree of freedom technology is applied in the direction of manipulators, program-controlled manipulators, and appliances that help people walk. It can solve problems that affect the use effect, lack of internal rotation/external rotation degrees of freedom, and non-adjustable ankle joint height. Natural walking gait, simple operation, compact and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing, and the explanation of each label among the figure is:
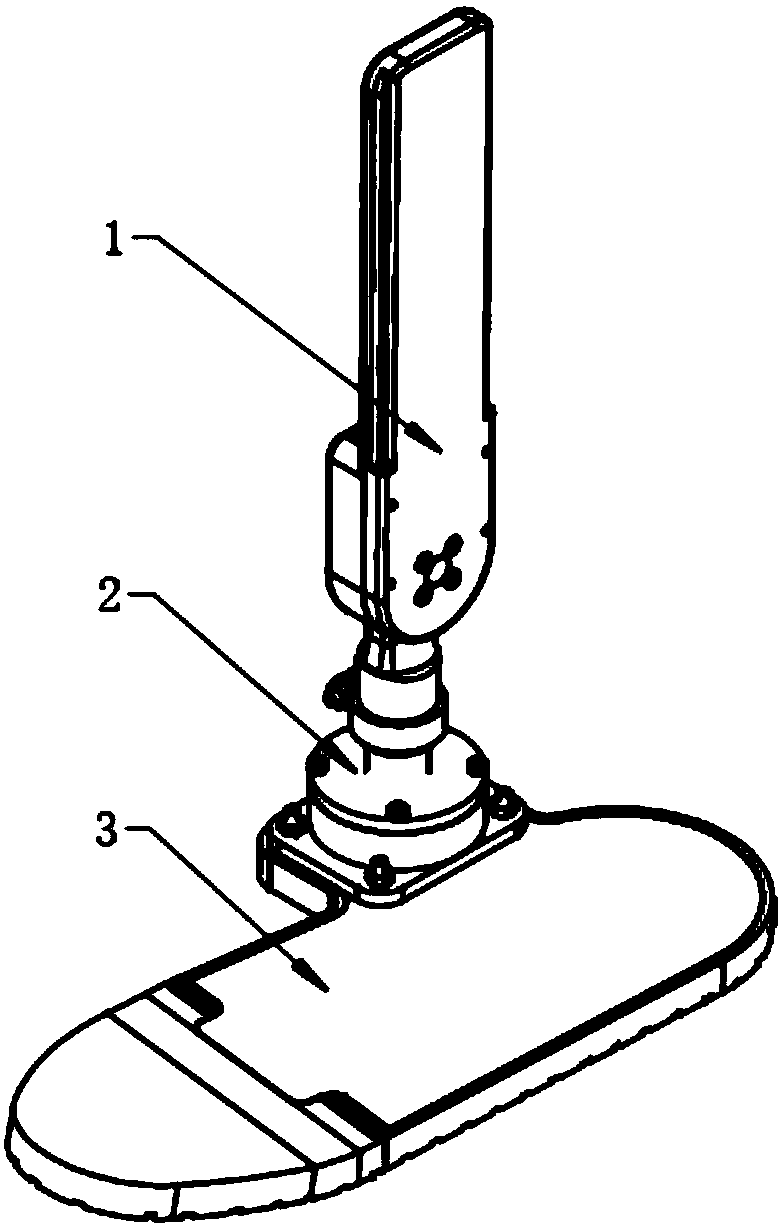
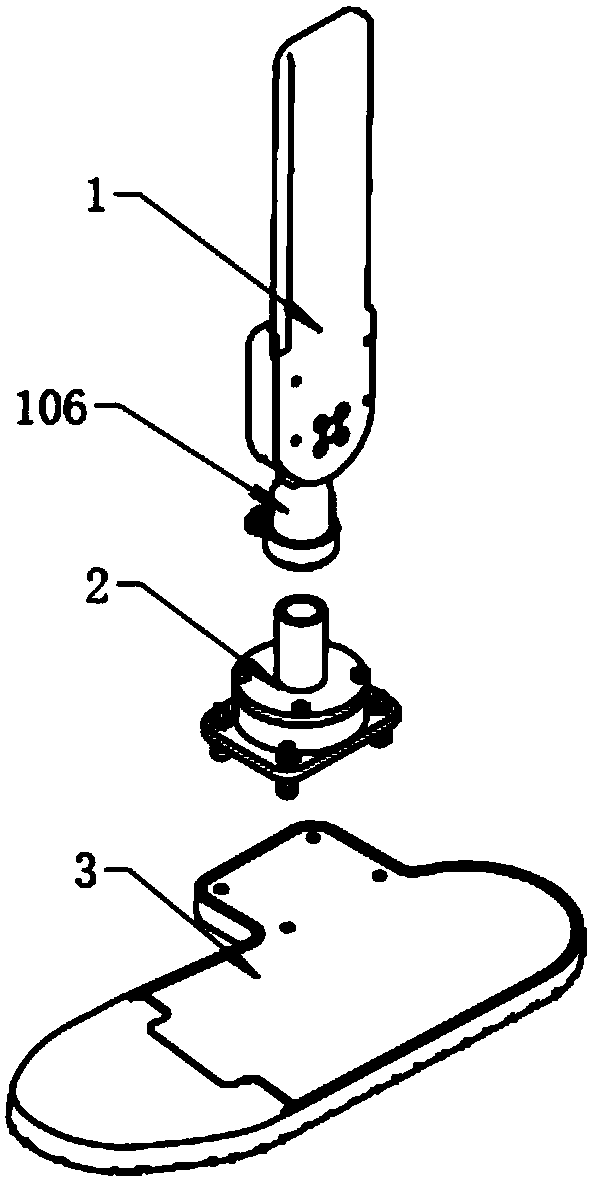
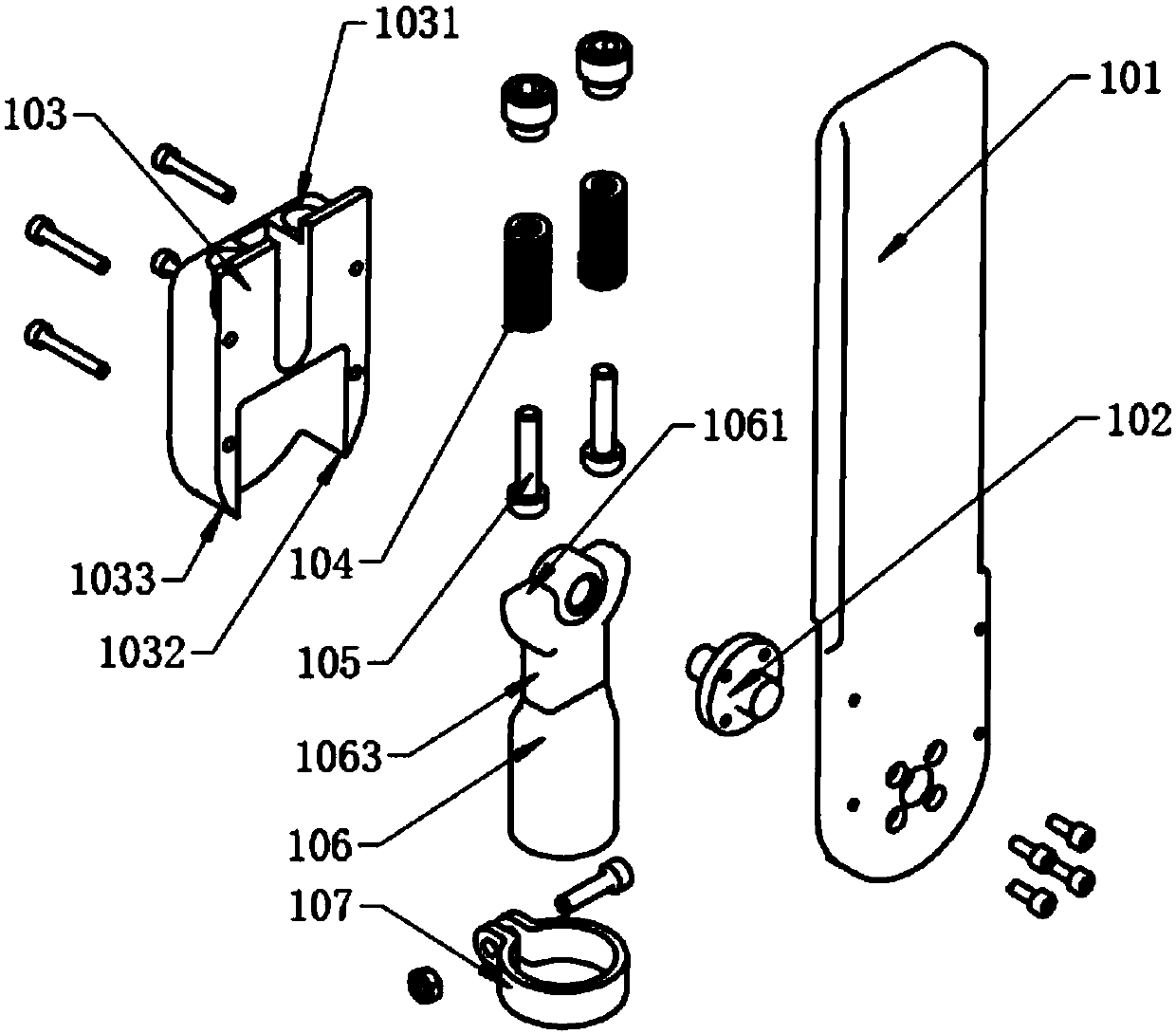
[0026] 1-ankle joint linkage device, 101-calf rod, 102-ankle joint shaft, 103-ankle joint fixing box, 1031-threaded through hole, 1032-first protrusion, 1033-second protrusion, 104-spring , 105-guide rod, 106-first ankle joint link, 1061-support platform, 1063-middle characteristic surface, 107-card sleeve; 2-ankle joint seat device, 201-cover plate, 202-second ankle joint Connecting rod, 203-first flat key, 204-torsion spring, 2041-first keyway, 2042-second keyway, 205-ankle joint seat, 206-second flat key; 3-plantar device, 301-spring leaf , 3011-protrusion, 302-sole.
[0027] The present invention comprises an ankle joint linkage device 1, an ankle joint seat device 2 and a sole device 3 which are sequentially connected from top to bottom.
[0028] The ankle joint linkage device 1 utilize...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More