

Mechanical arm structure of robot
A manipulator, robot technology, applied in the field of robots, can solve the problems of occupation, low efficiency, cumbersome and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
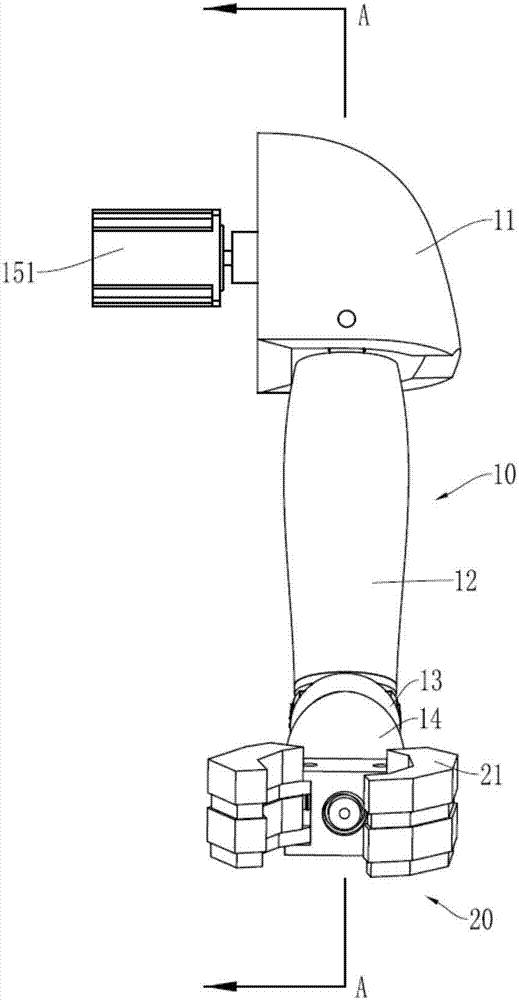
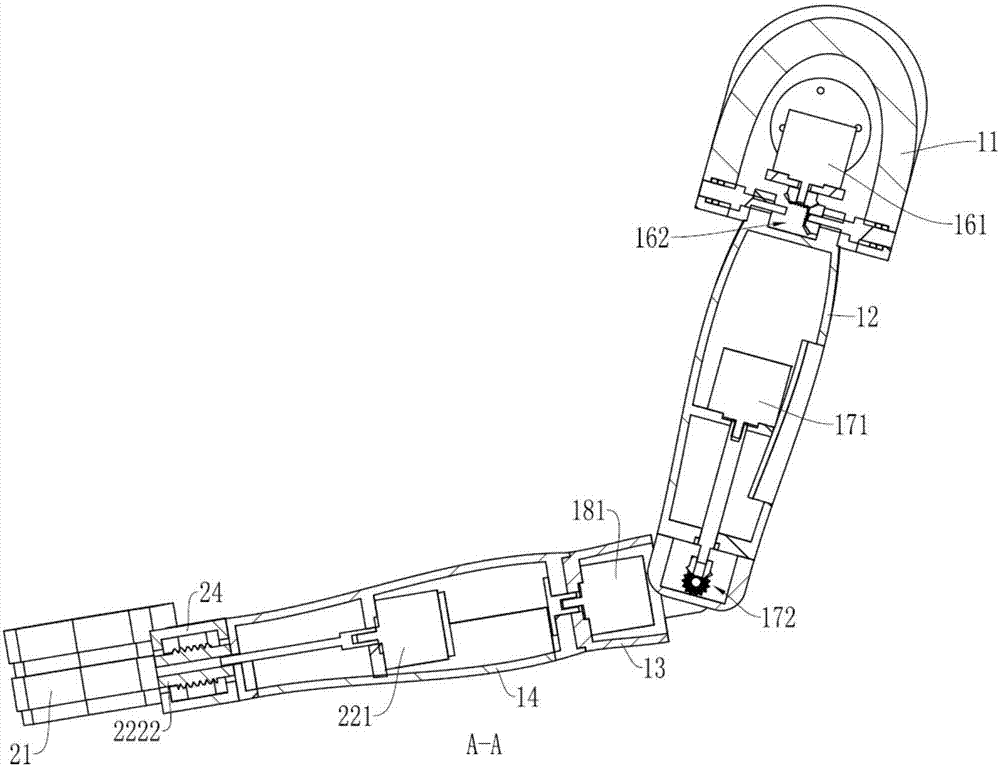
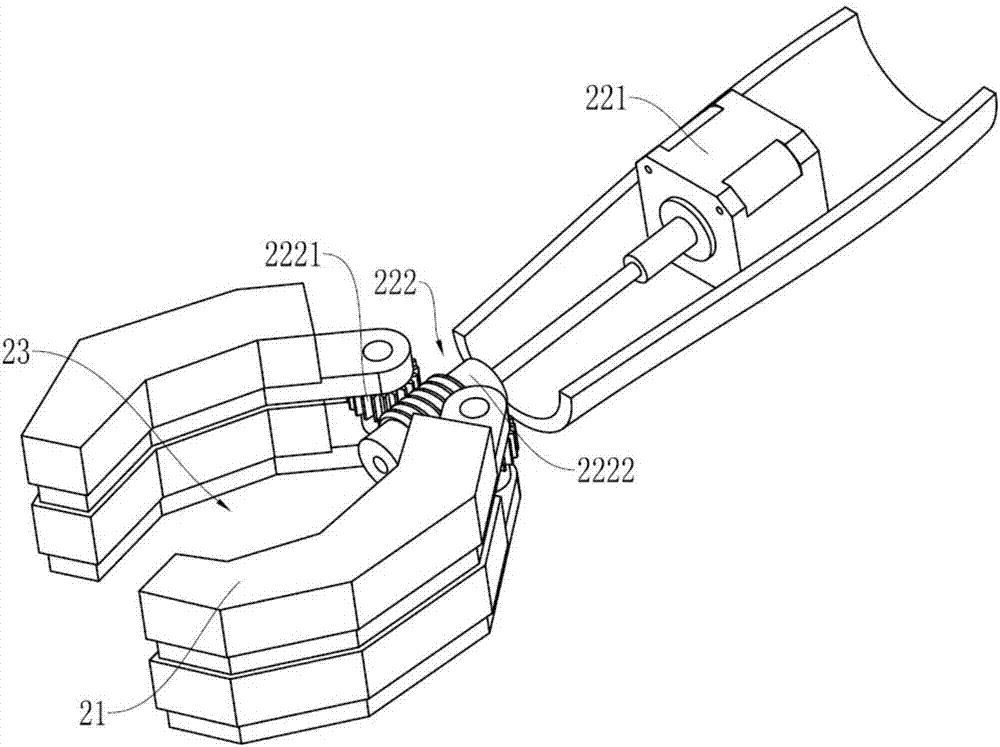
[0023] Such as Figure 1-Figure 2 As shown, the manipulator structure of a robot in a preferred embodiment of the present invention is used to connect to the side of the robot body of the banquet robot, which includes an arm structure 10 and a mechanical claw 20, and its arm structure 10 is mainly used to realize the whole arm. Front and rear, left and right, and up and down directions, the arm structure 10 includes: a shoulder 11, which is used to connect to the robot body with the first rotation axis as the rotation center; a first arm 12, which is connected to the robot body with the second rotation axis as the rotation center. The shoulder 11, the second axis of rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More