

A humanoid thoracic-back joint system based on pneumatic muscles
A technology of pneumatic muscles and joints, applied in the field of bionic robots, can solve problems such as chest and back joint strain, achieve high power/mass ratio, good flexibility, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
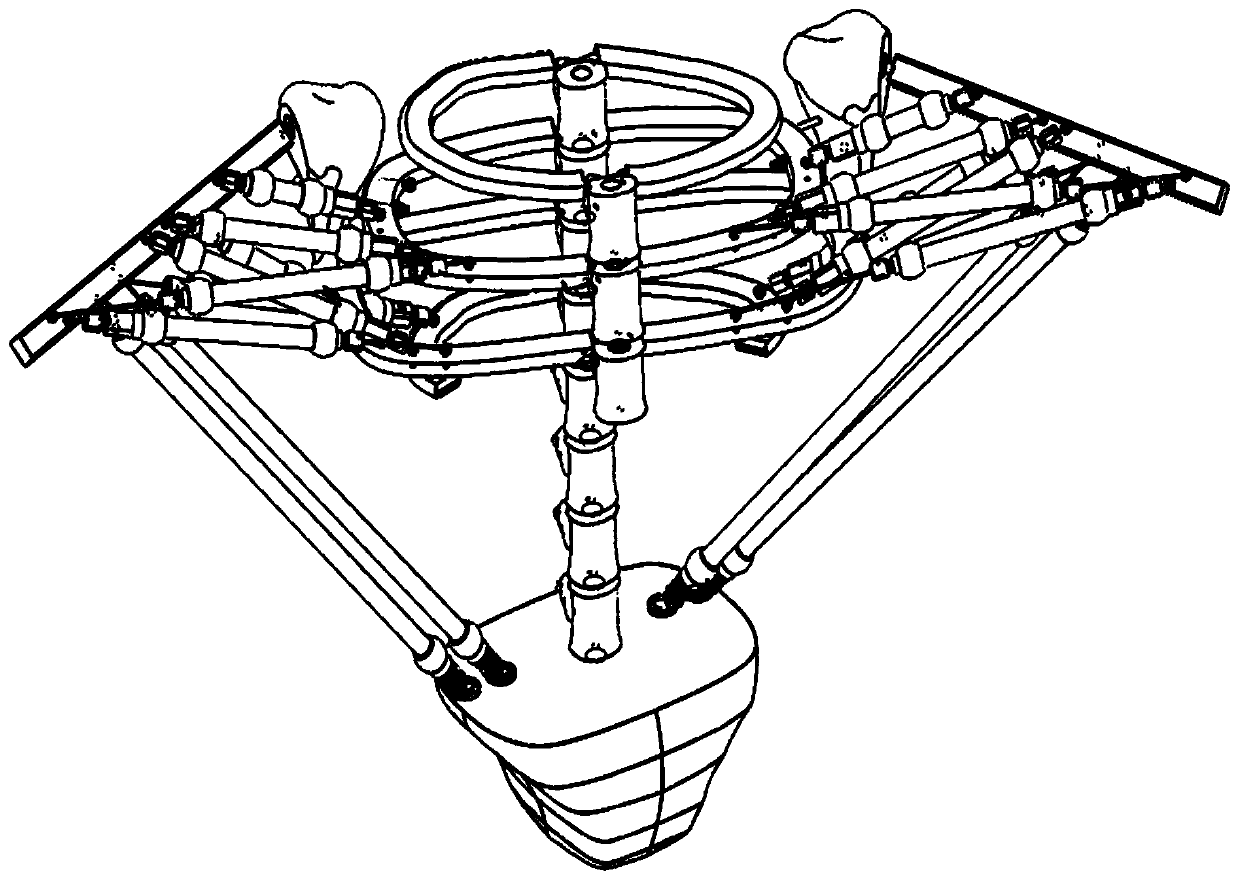
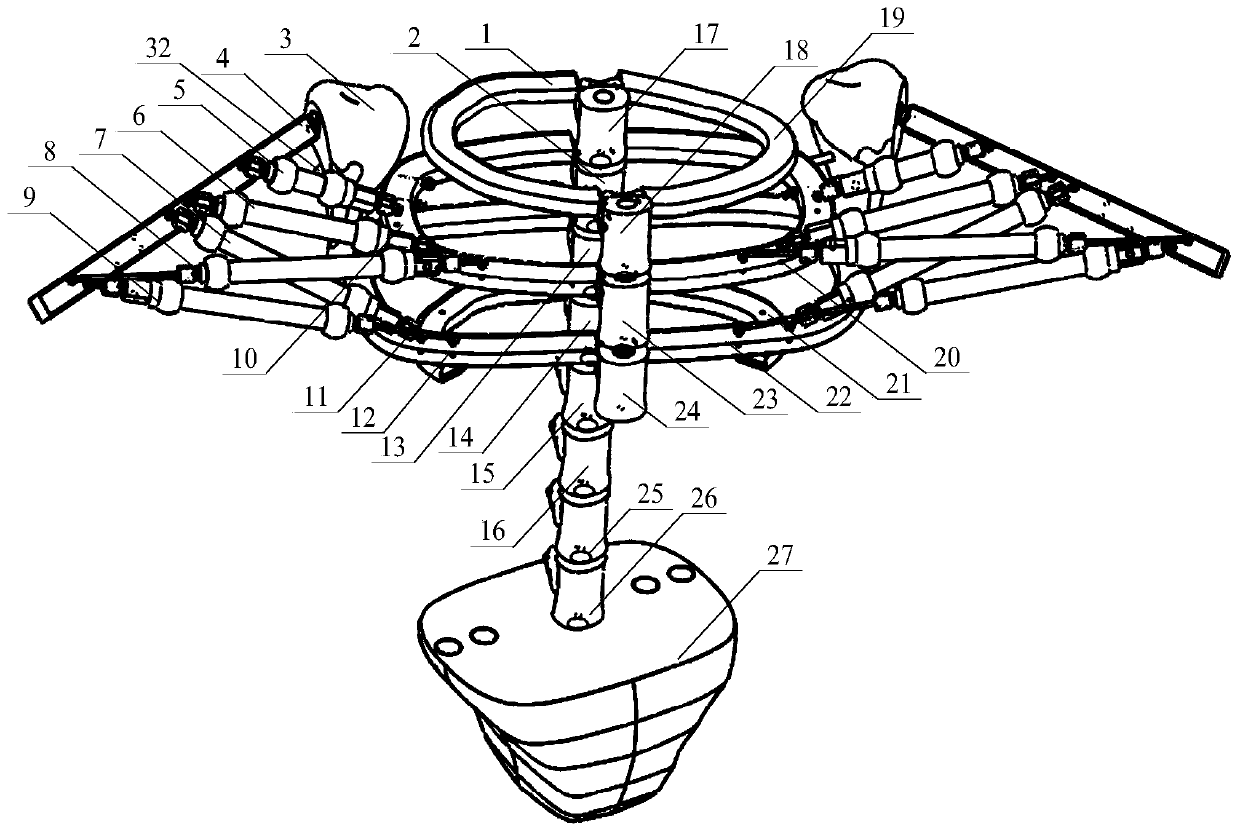
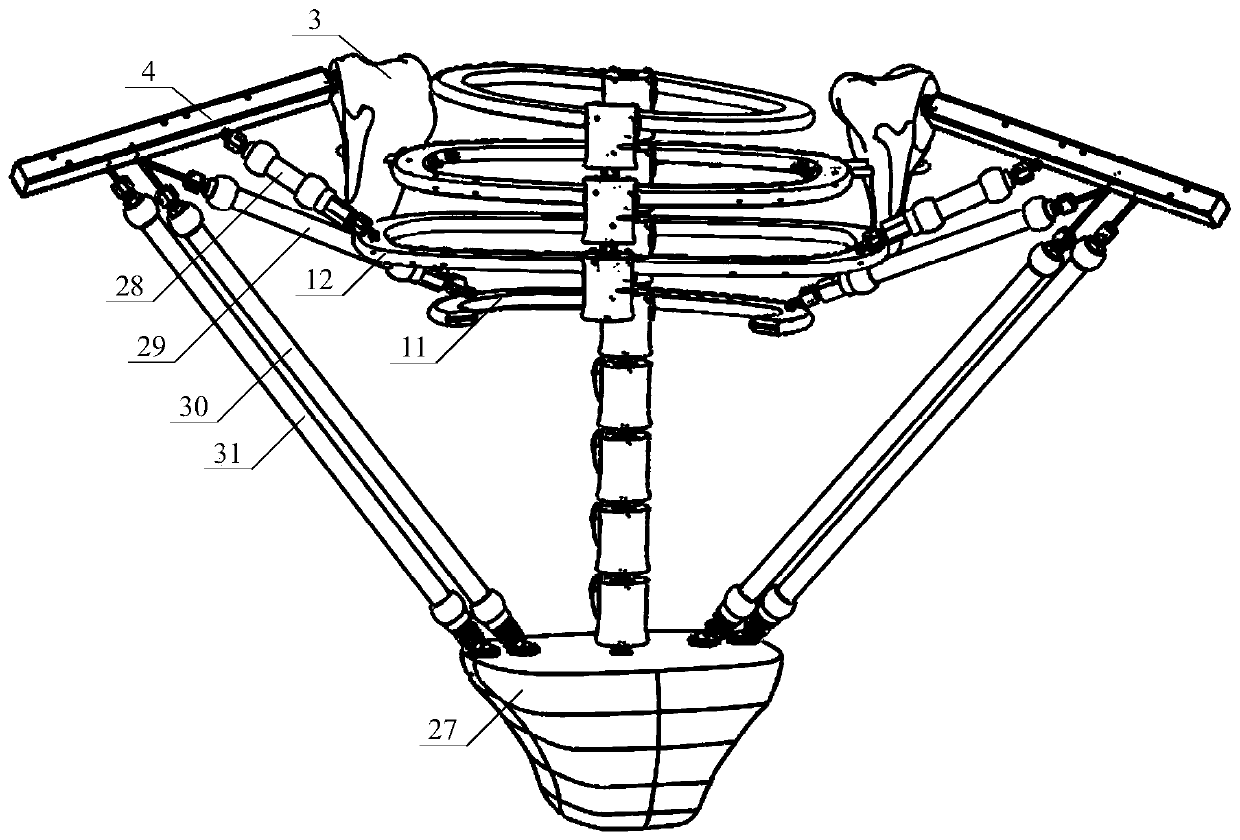
[0023] Such as Figure 1-3 As shown, a humanoid thoracic-back joint system based on pneumatic muscles, including the thoracic-back bone part, the left shoulder joint part, and the right shoulder joint part;
[0024] The chest and back bones include rib one 1, vertebra two 2, rib two 10, rib three 12, rib four 11, vertebra three 13, vertebra four 14, vertebra five 15, vertebra six 16, vertebra one 17, vertebra nine 18, ribs Five 19, rib six 20, rib eight 21, rib seven 22, vertebra ten 23, vertebra eleven 24, vertebra seven 25, vertebra eight 26 and pelvis 27;
[0025] Vertebra one 17, vertebra two 2, vertebra three 13, vertebra four 14, vertebra five 15, vertebra six 16, vertebra seven 25, vertebra eight 26 are rotatably connected in turn to form the rear end; vertebra nine 18, vertebra ten 23, vertebra ten One 24 is rotatably connected in turn to form the front end; the lower end of vertebra eight 26 is rotatably connected to the pelvis 27;
[0026] Both ends of rib one 1 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More