

Artificial bee colony-based Monte Carlo localization method
A positioning method and artificial bee colony technology, applied in the field of positioning, can solve problems such as slow convergence speed, noise, and positioning failure, and achieve the effect of improving the exploration ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
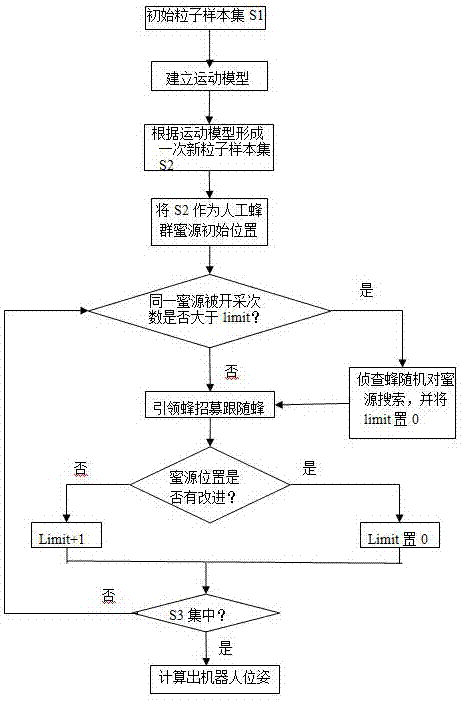
[0041] see figure 1 A Monte Carlo positioning method based on artificial bee colony, according to the traditional Monte Carlo positioning method, using N discrete particles with weights to simulate the posterior probability density function of the estimated state,
[0042] Bel(x)={x i ,ω i} i=1…N
[0043] x i represents a particle, ω i Represents the weight of the particle, the specific steps are as follows:
[0044] 1) Initialize the initial particle sample set S1 of a certain number of particles in a given space
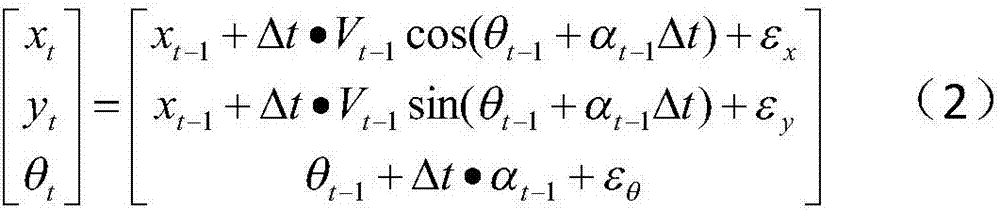
[0045] Select the coordinate value of the robot on the map and the angle with the x-axis direction as the state quantity (x, y, θ), each particle is three-dimensional, and randomly generate N particles according to the formula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More