Parallel compression spring type double-acting balance cylinder applied to industrial robots
An industrial robot and compression spring technology, applied in the field of robots, can solve the problem of one-way balance: the extension spring only works when the spring is tensioned; the compression spring only works when the spring is compressed, which is unfavorable for promotion and high cost. , to achieve the effect of simple and compact structure, wide applicability and low production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
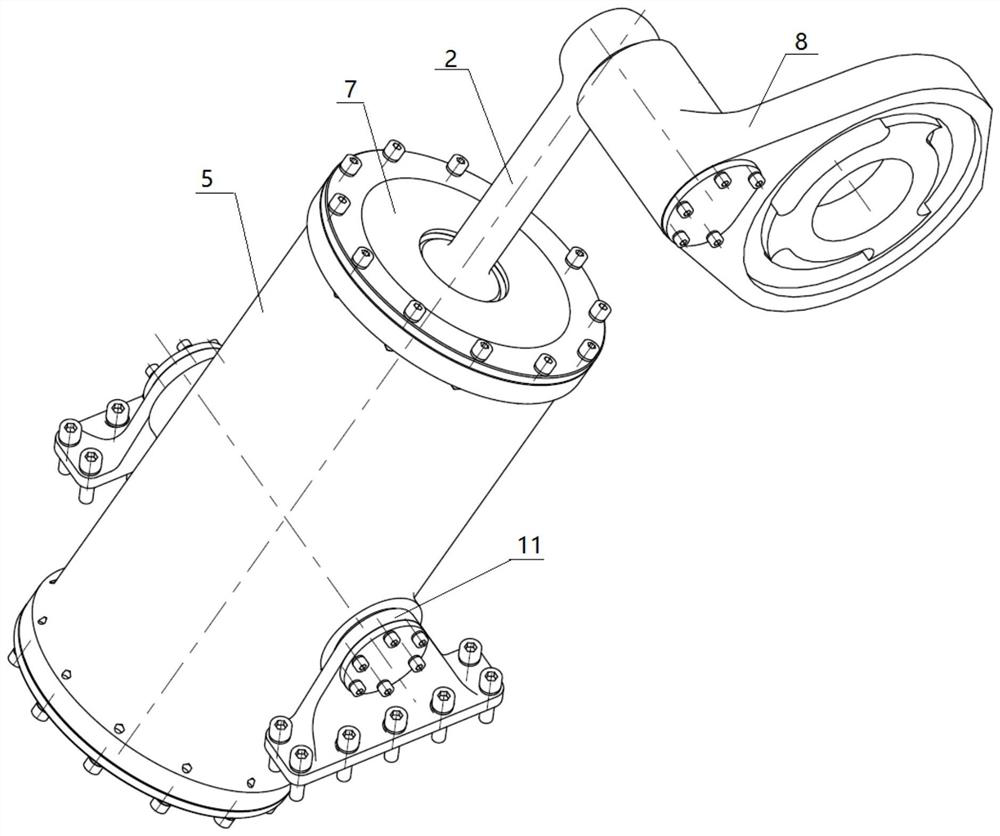
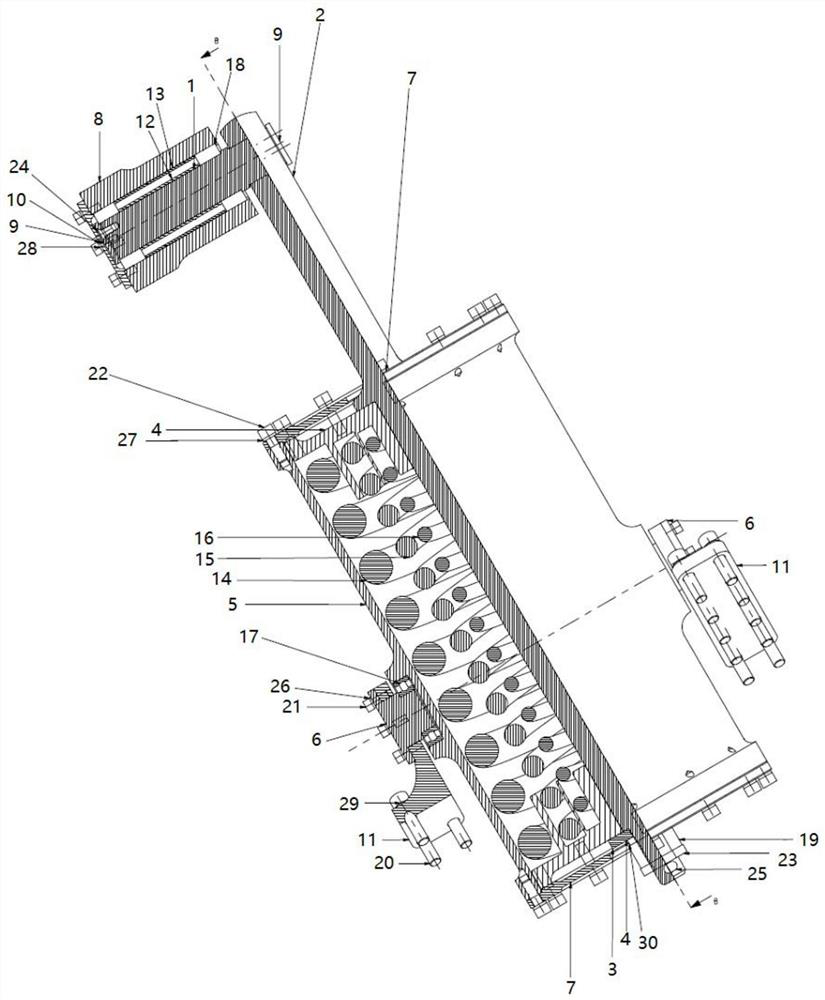
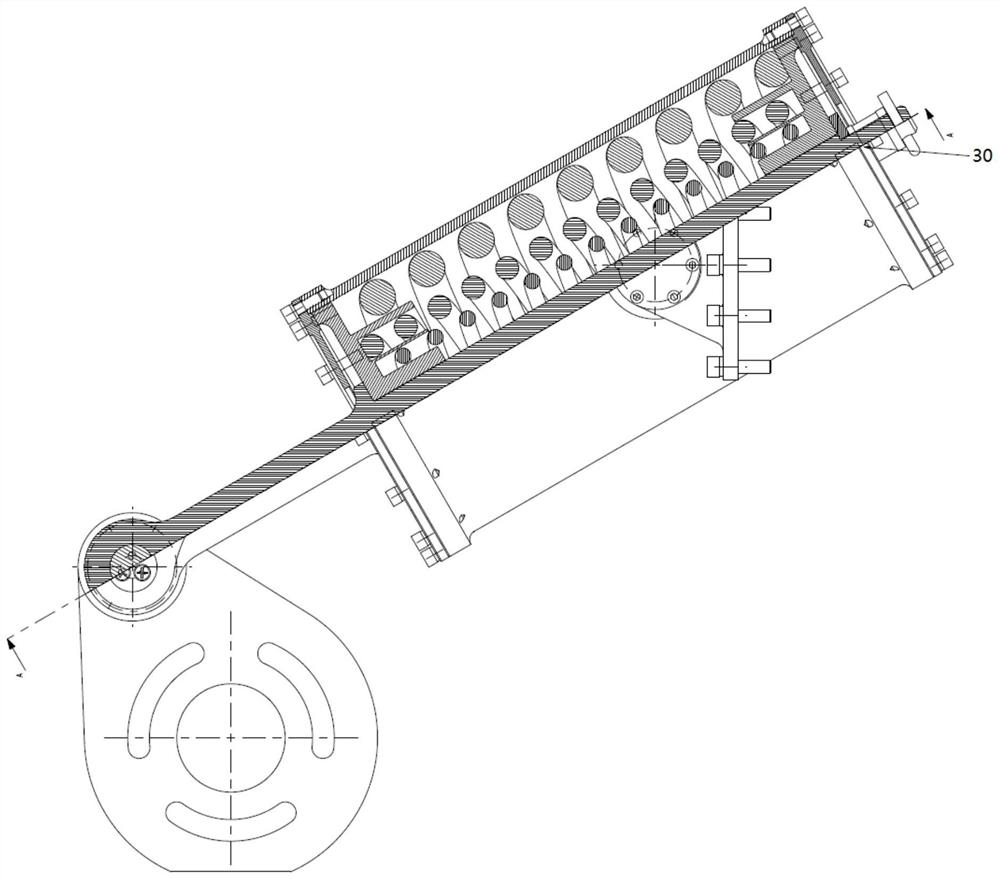
[0055] figure 1 A schematic diagram of the three-dimensional structure of the parallel compression spring type double-acting balance cylinder applied to the industrial robot provided by the present invention; figure 2 A schematic cross-sectional structure diagram of a parallel compression spring type double-acting balance cylinder applied to an industrial robot provided by the present invention; image 3 It is another schematic cross-sectional structure diagram of a parallel compression spring type do...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More