

A surgical instrument fixing device and a surgical robot
A surgical robot and surgical instrument technology, applied in the direction of surgical manipulators, surgical robots, etc., can solve the problems affecting the surgical effect, poor movement of the two arc rods, and affecting surgical accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0030] Specific embodiment 1: the present invention discloses a surgical robot operating end moving device, comprising:
[0031] The first connecting piece, the first connecting piece is directly installed on the surgical robot
[0032] An arc, the arc is installed on the first connecting piece, and a plurality of bending structures are arranged between the arc and the installation of the first connecting piece and the surgical robot;
[0033] A fixing device, the fixing device is used to install the surgical instrument, and can control the reciprocating movement of the surgical instrument along the radial direction of the arc-shaped piece, and the fixing device is provided with a locking piece and the arc-shaped piece to cooperate;
[0034] Power device, the first connecting piece is provided with a power device connection and fixing device to drive the fixing device to rotate around the arc center of the arc, and the distance between the connection point of the power device ...
specific Embodiment 2
[0044] Specific embodiment 2: This embodiment discloses a surgical robot operating end moving device, each of which is described in detail according to the accompanying drawings.
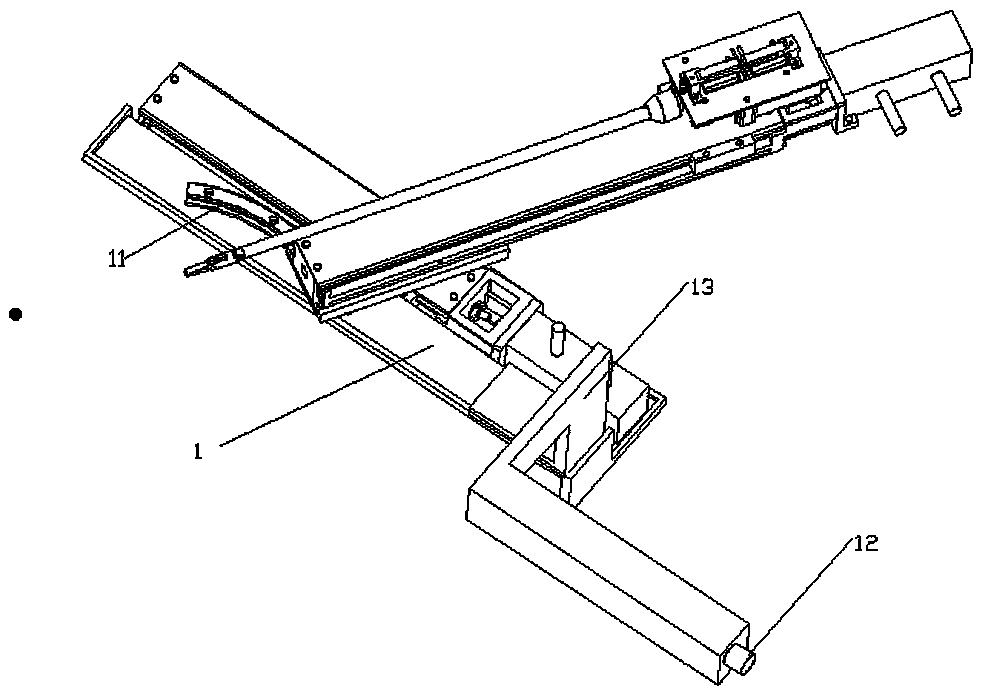
[0045] figure 1 It is a schematic diagram of the overall structure of this embodiment, which mainly includes two parts in the figure;
[0046] The first part is the first connecting piece 1, the end of the first connecting piece 1 is provided with the mounting seat 12 installed on the robot, and the middle is an L-shaped connecting rod 13, and the lower end of the L-shaped connecting rod is provided with different There are two planar plate structures, the upper one is provided with a guide rail 11, and the guide rail 11 is fixed on the first connector 1, and the lower one is equipped with a power device. At the end of the mounting seat 12, the entire first connector 1 can be wound around With the rotation of the mounting seat 12.
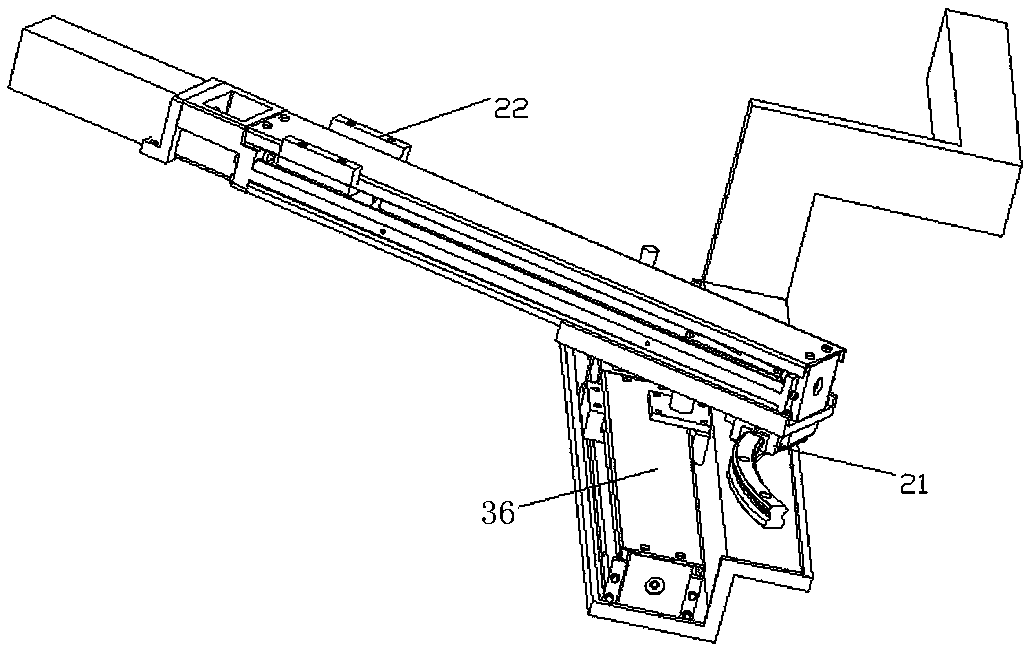
[0047] The second part is the structure of the fixing device, whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More