

Method and research system for controlling crawling deflection behavior of bumblebee robot
A robot and behavioral technology, applied in the field of insect robots, can solve problems such as blank brain areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0045] (1) Selection of stimulating sites in bumblebee neural circuits
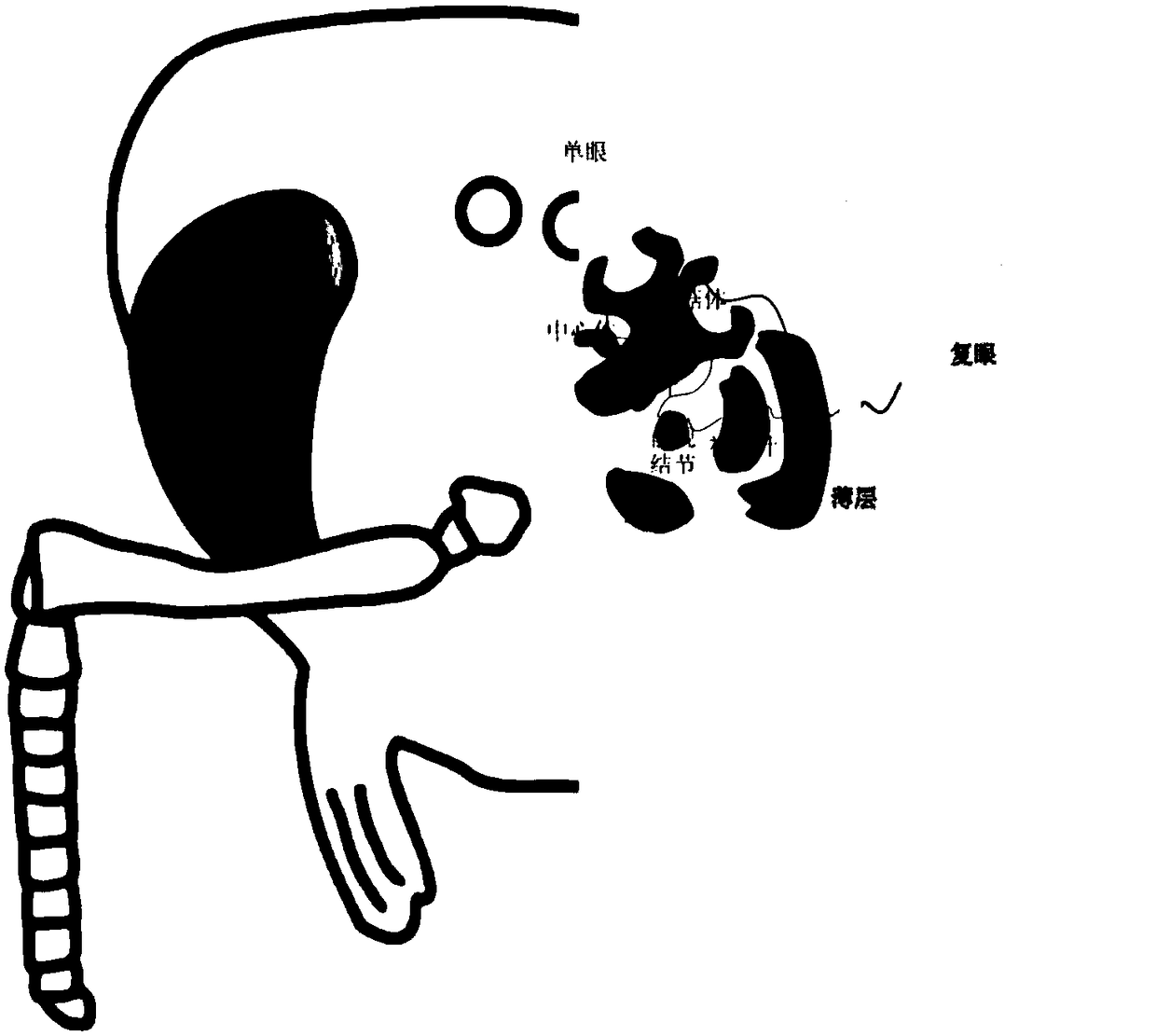
[0046] A schematic diagram of the brain structure drawn based on the current understanding of the bumblebee's physiological structure and morphological structure ( figure 1), in which, according to the existing literature, the main brain structures in the insect brain, including the optic lobe, antennal lobe, mushroom body, etc., are marked out. The optic lobe is mainly involved in the processing of insect visual information, and the antennal lobe is involved in the processing of olfactory information. Processing, structural schematic diagrams are convenient for understanding the neural circuits of insects and finding suitable stimulation recording sites, brain outline reference paper [Segregation of Visual Inputs From Different Regions of the Compound Eye in Two Parallel Pathways Through the Anterior Optic Tubercle of the Bumblebee (Bombusignitus)] .
[0047] In this example, based on the existing liter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More