

Large variable diameter wheeled T-shaped pipeline robot
A pipeline robot and wheeled technology, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of high cost, invariable diameter and variable diameter range, etc., and achieve the effect of low cost, large variable diameter and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
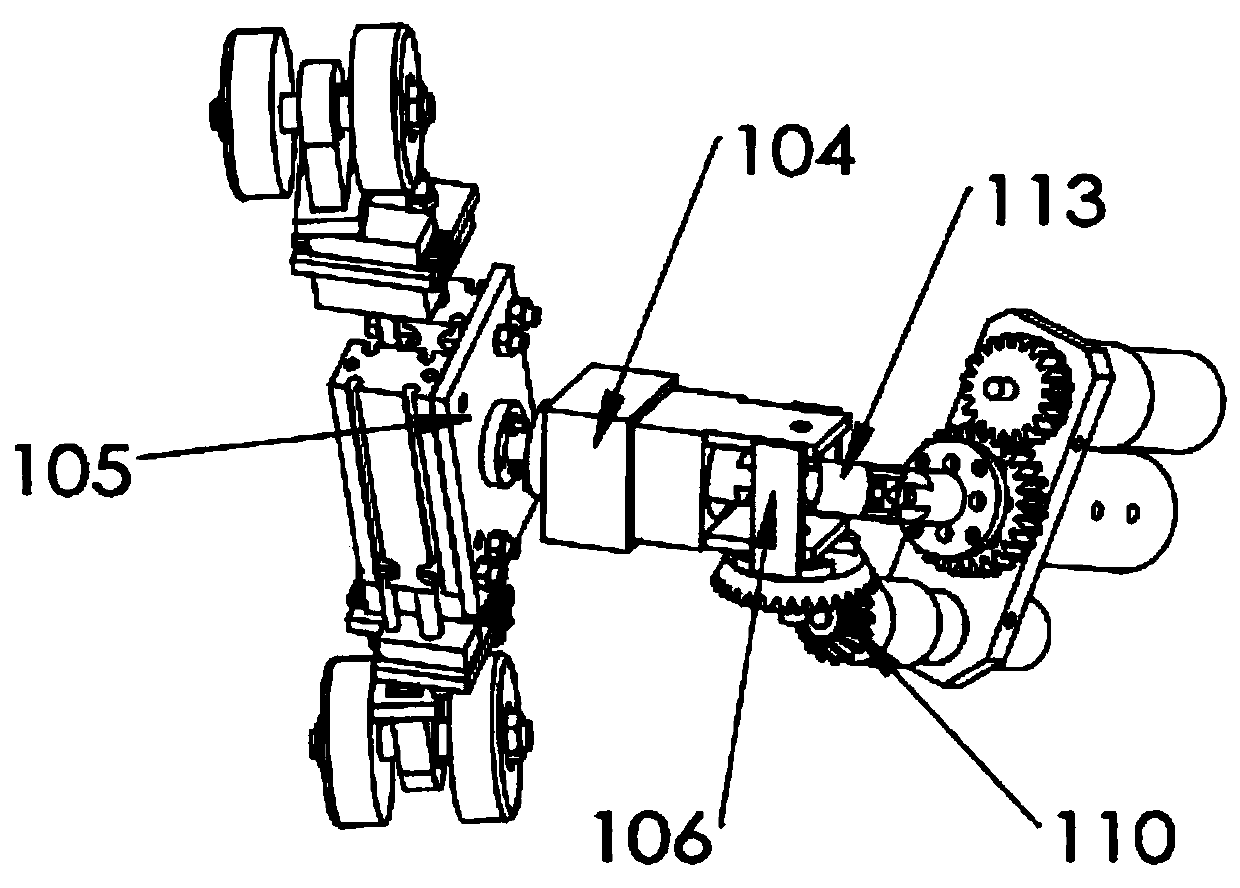
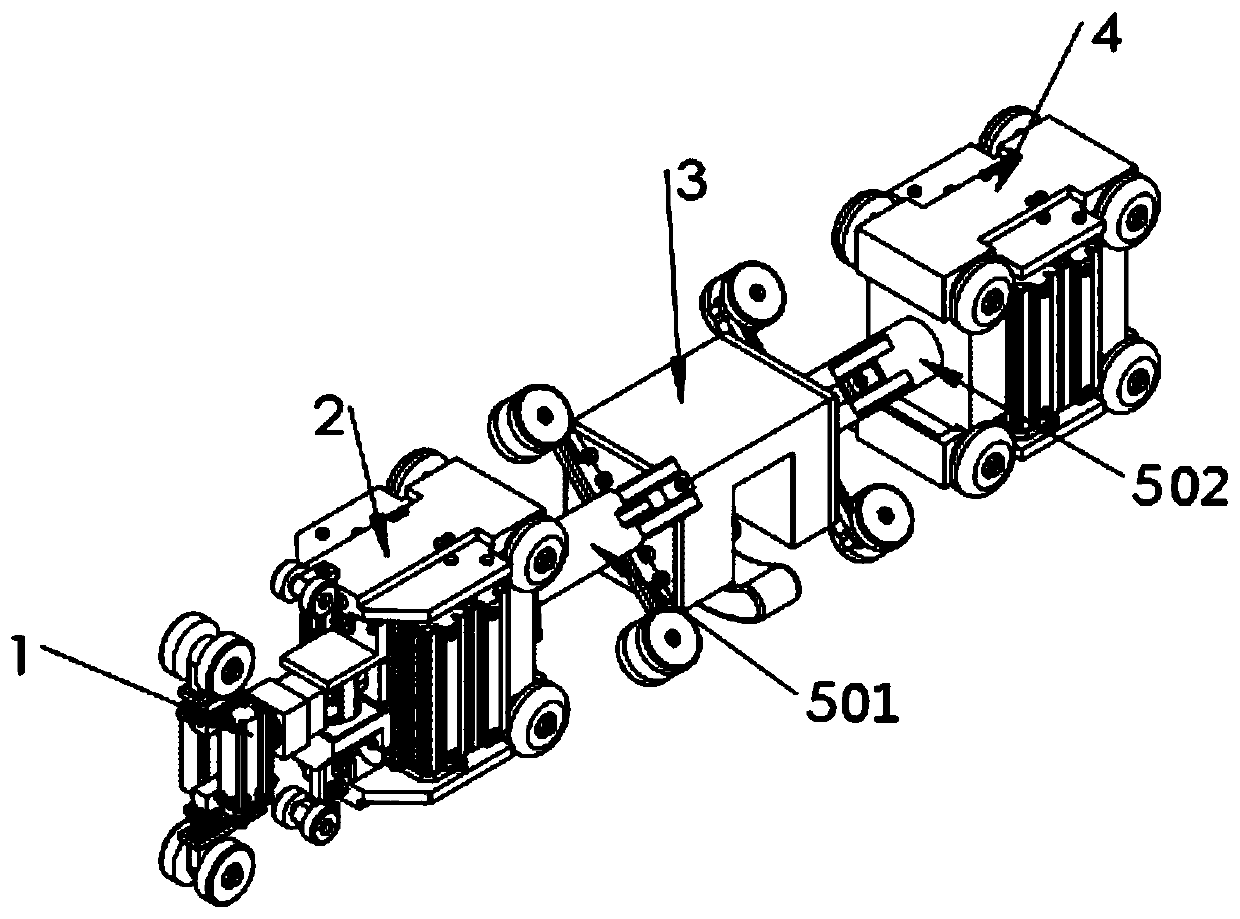
[0025] see Figure 1 to Figure 10 , a large variable diameter wheeled T-shaped pipeline robot, including a helical traveling mechanism 1, a front driving mechanism 2 and an operating mechanism 3.
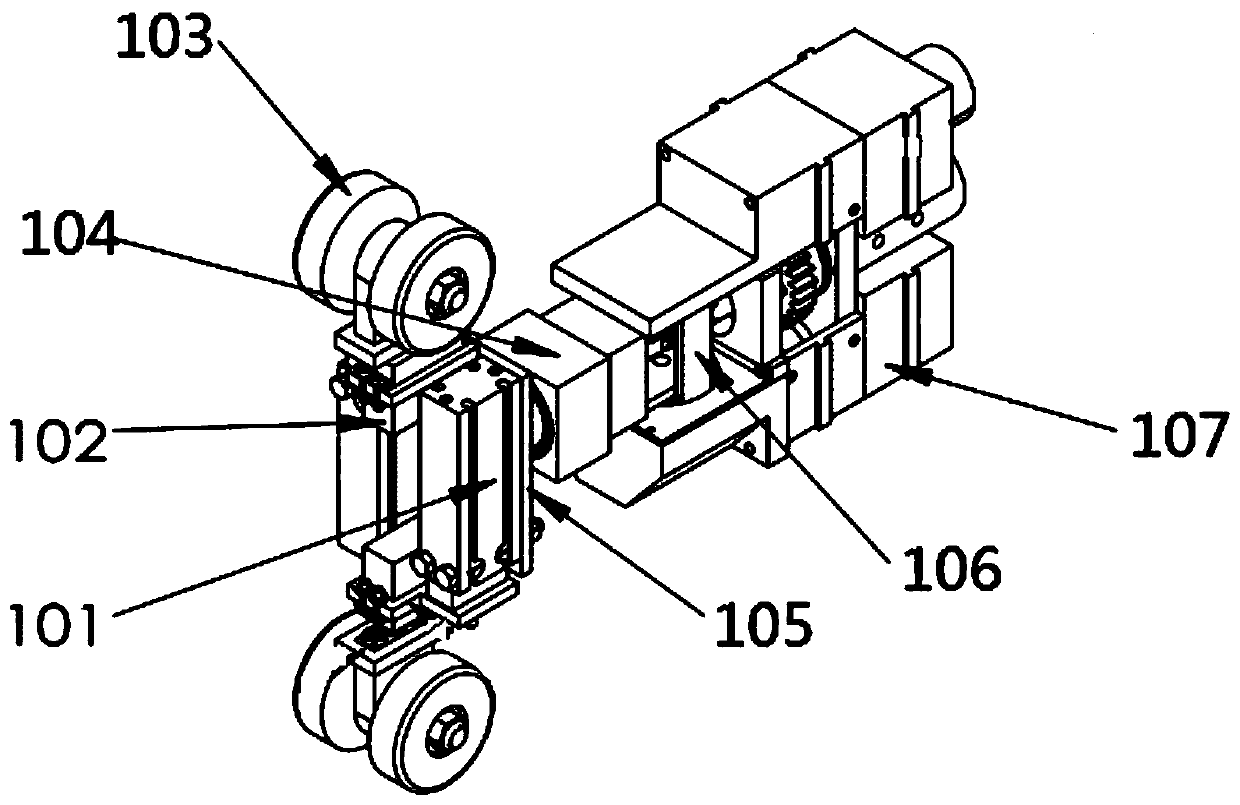
[0026] The spiral walking mechanism 1 includes a rotating vertical plate 105, and two variable-diameter cylinders I101 are installed on the front face of the rotating vertical plate 105, wherein the output shaft of one variable-diameter cylinder I101 faces upward, and the other variable-diameter cylinder I101 The output shaft of each variable diameter cylinder I101 is equipped with a steering gear I102 on the output shaft facing downwards, and a traction wheel 103 is installed on the output shaft of each steering gear I102. The wheels 103 are arra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More