

Unmanned aerial vehicle control method and device
A control method and unmanned aerial vehicle technology, applied in the electronic field, can solve problems such as poor stability and robustness, achieve the effect of improving stability and robustness, and solving poor stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
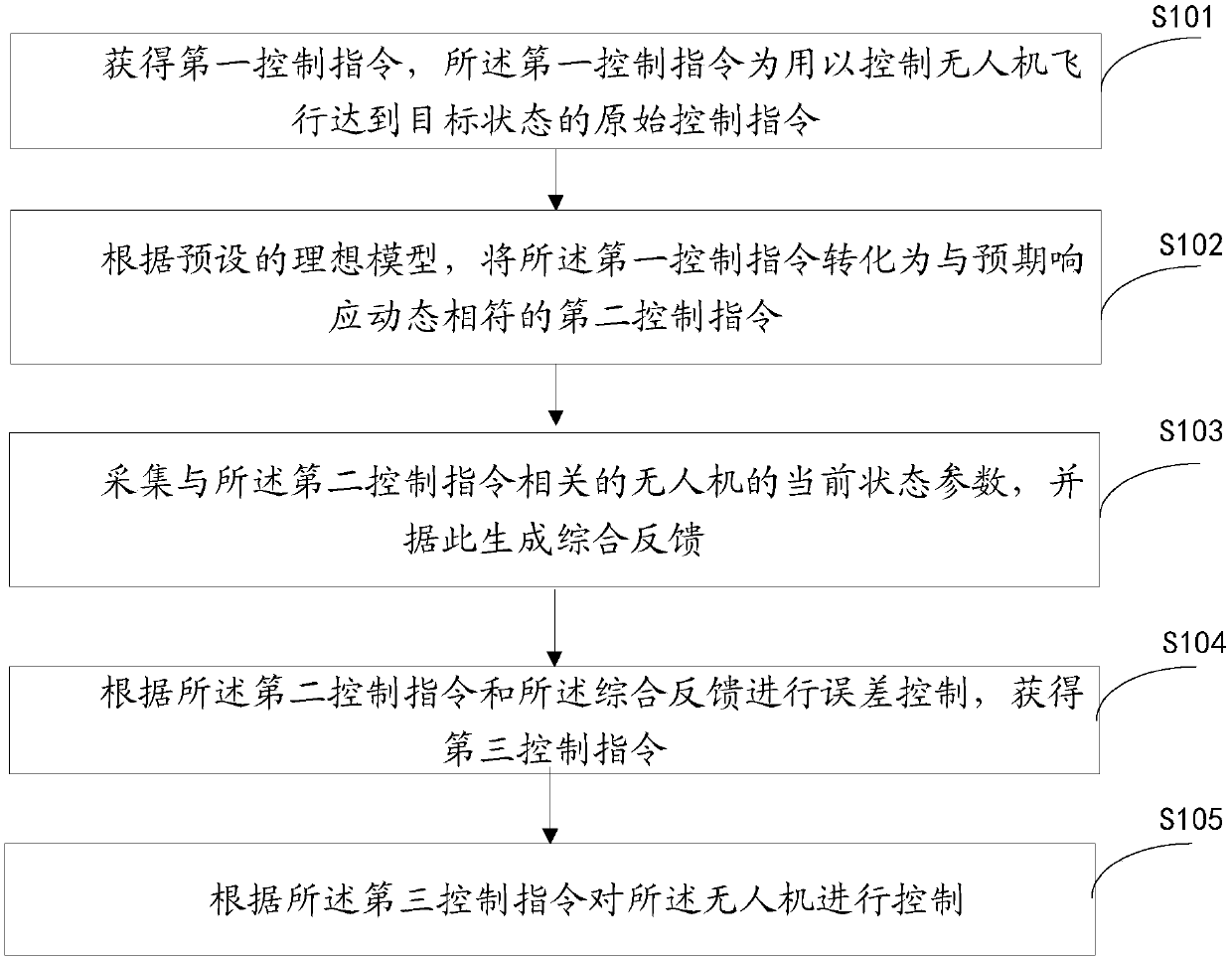
[0064] The first aspect of the present invention provides a control method for unmanned aerial vehicles, please refer to figure 1 , is a flowchart of a method for controlling a drone in an embodiment of the present invention. The method includes:
[0065] S101: Obtain a first control instruction, where the first control instruction is an original control instruction used to control the drone to fly to a target state.
[0066] Specifically, the first control command is a single or comprehensive control command used to control the state of the UAV. The comprehensive control command can be a comprehensive quantity of speed and attitude, or a comprehensive quantity of overload, angular rate and dynamic pressure, etc. The first Control instructions can control the actions of the drone.
[0067] S102: Transform the first control instruction into a second control instruction dynamically consistent with the expected response according to a preset ideal model.
[0068] In the specif...
Embodiment 2
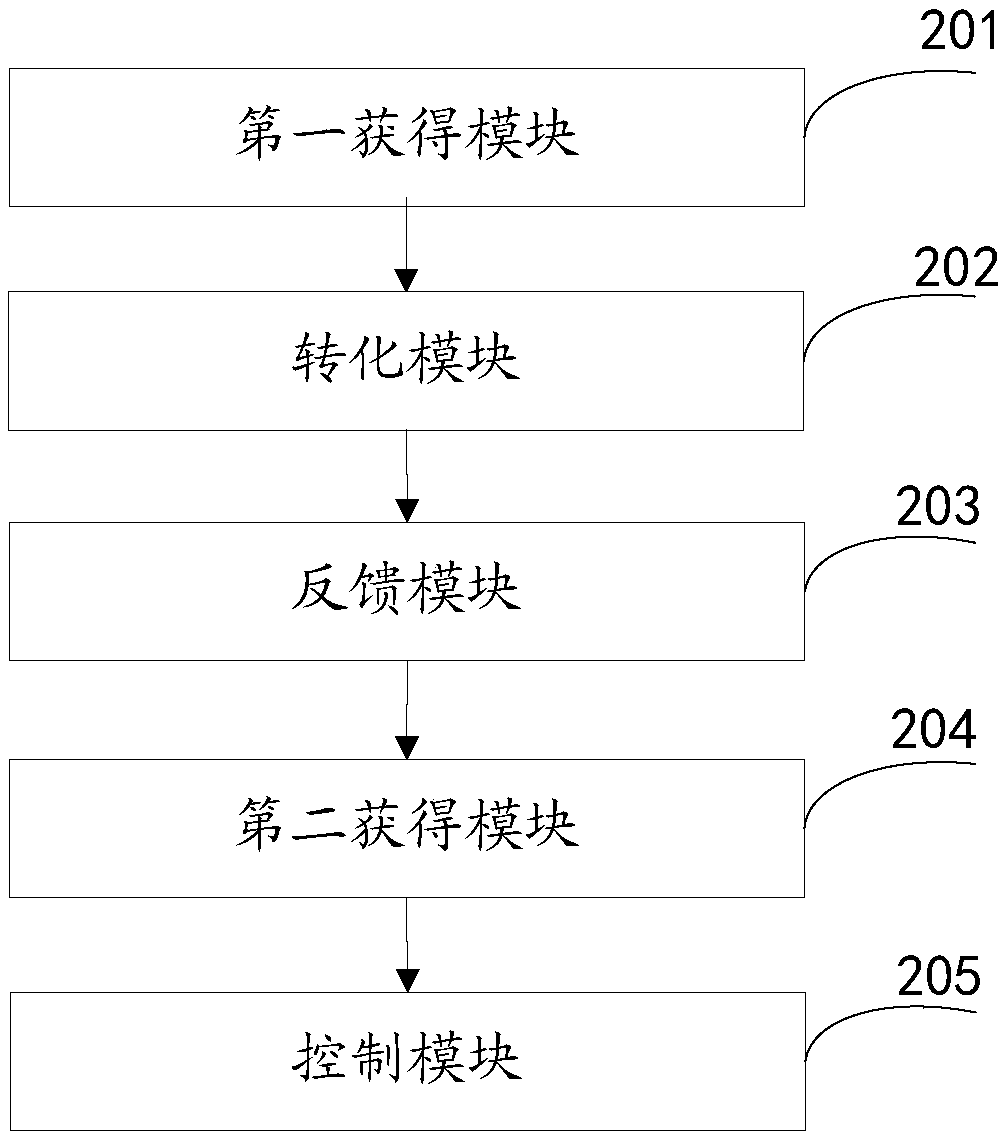
[0103] Based on the same inventive concept as the control method of the drone in the aforementioned first aspect, Embodiment 2 of the present invention also provides a control device for the drone, such as figure 2 shown, including:
[0104] The first obtaining module 201 is used to obtain a first control instruction, and the first control instruction is an original control instruction used to control the UAV to fly to a target state;
[0105] A transformation module 202, configured to transform the first control instruction into a second control instruction that dynamically conforms to the expected response according to a preset ideal model;
[0106] A feedback module 203, configured to collect the flight state parameters of the UAV related to the second control instruction, and generate comprehensive feedback accordingly;
[0107] The second obtaining module 204 is configured to perform error control according to the second control instruction and the comprehensive feedbac...
Embodiment 3
[0122] Based on the same inventive concept as the UAV control method in the first embodiment, the third embodiment of the present invention also provides a computer-readable storage medium, such as image 3 As shown, there is stored thereon a computer program which, when executed by a processor, implements the following steps:
[0123] Obtaining a first control instruction, the first control instruction is an original control instruction used to control the UAV to fly to a target state;
[0124] converting the first control instruction into a second control instruction dynamically consistent with the expected response according to a preset ideal model;
[0125] Collecting the flight state parameters of the UAV related to the second control instruction, and generating comprehensive feedback accordingly;
[0126] performing error control according to the second control instruction and the comprehensive feedback to obtain a third control instruction;
[0127] The drone is contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More