

UAV 3D scene path navigation platform and its 3D improved path planning method
A three-dimensional scene and path navigation technology, applied in the field of navigation, can solve the problems of long algorithm time, no UAV attitude information, inability to dynamically display the UAV obstacle avoidance process, etc., to achieve the effect of short time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
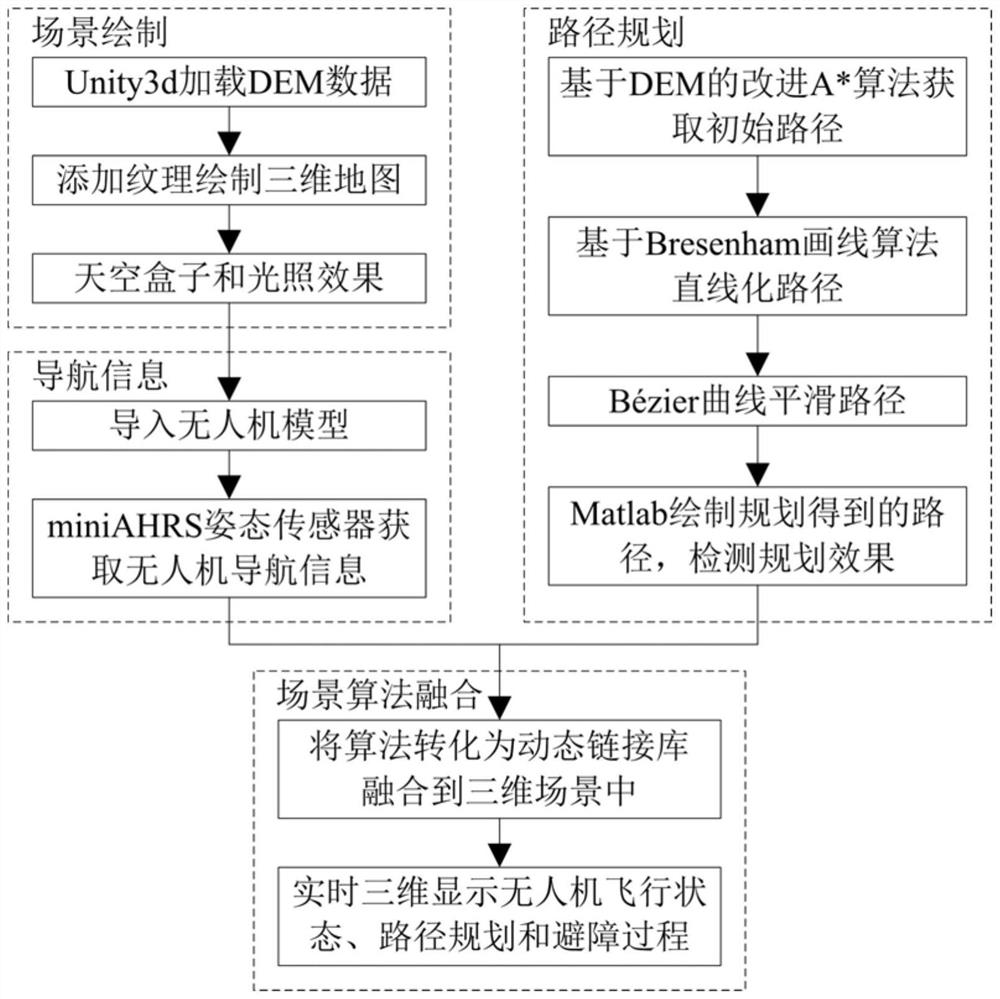
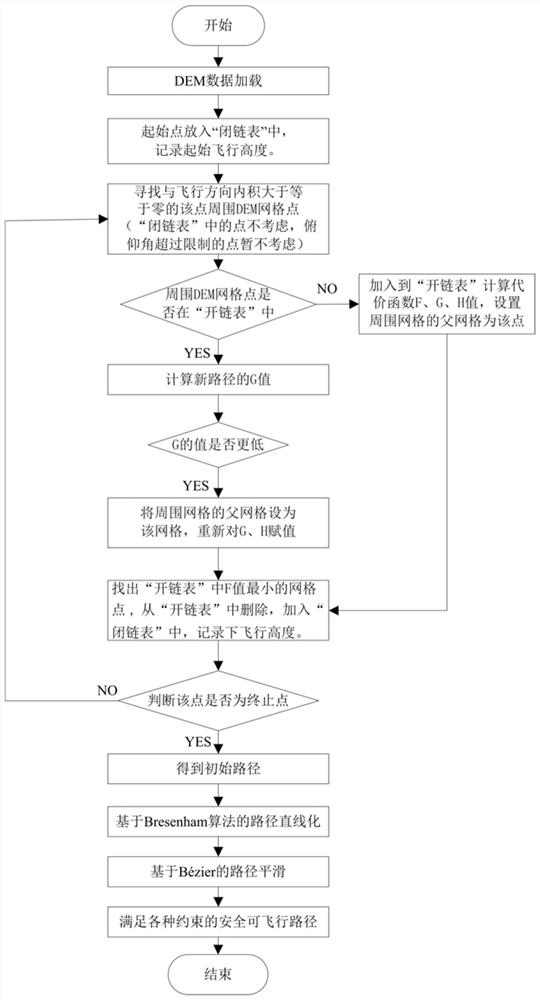
[0078] Such as Figure 1~6 As shown, a UAV 3D path navigation platform loads DEM map data based on Unity3d to display 3D scenes; through VS2010C++ programming, a 3D improved path planning algorithm based on DEM is realized to obtain a safe flight path for UAVs. And use Matlab2012a to draw and plan the results of path detection and planning; import the UAV model, and combine the miniAHRS attitude sensor to obtain the current UAV flight attitude; integrate the path planning algorithm into the 3D scene, and analyze the flight status and obstacle avoidance of the UAV Real-time three-dimensional display of the process;
[0079] A three-dimensional path navigation platform for unmanned aerial vehicles such as figure 1 The steps shown are implemented.
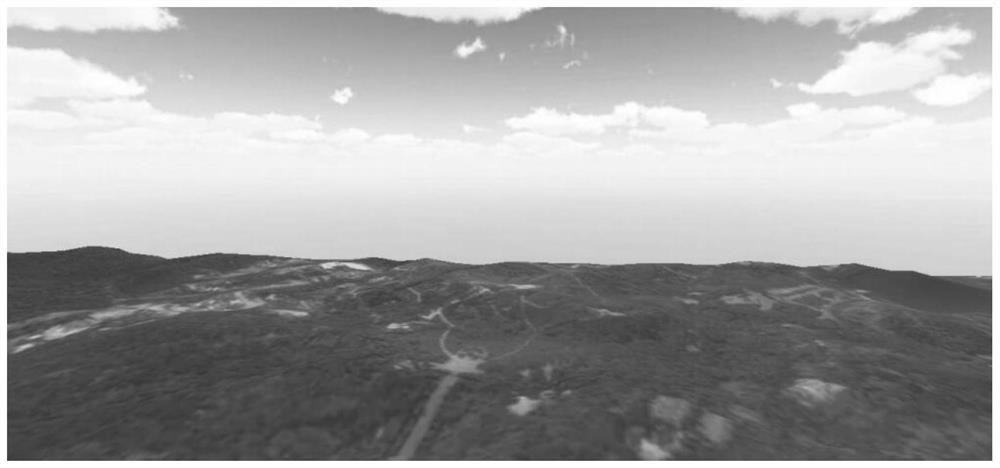
[0080] Step 1. Scene drawing: Unity3d loads DEM data, adds corresponding map texture information to DEM, and adds skybox and lighting effects. Such as figure 2 As shown, the three-dimensional scene is realistically displayed. St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More