

Artificial intelligent calligraphy robot
A technology of artificial intelligence and robotics, applied in the field of calligraphy robots, can solve problems such as the lack of human aesthetics in neural network learning, and achieve the effect of improving the level of calligraphy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
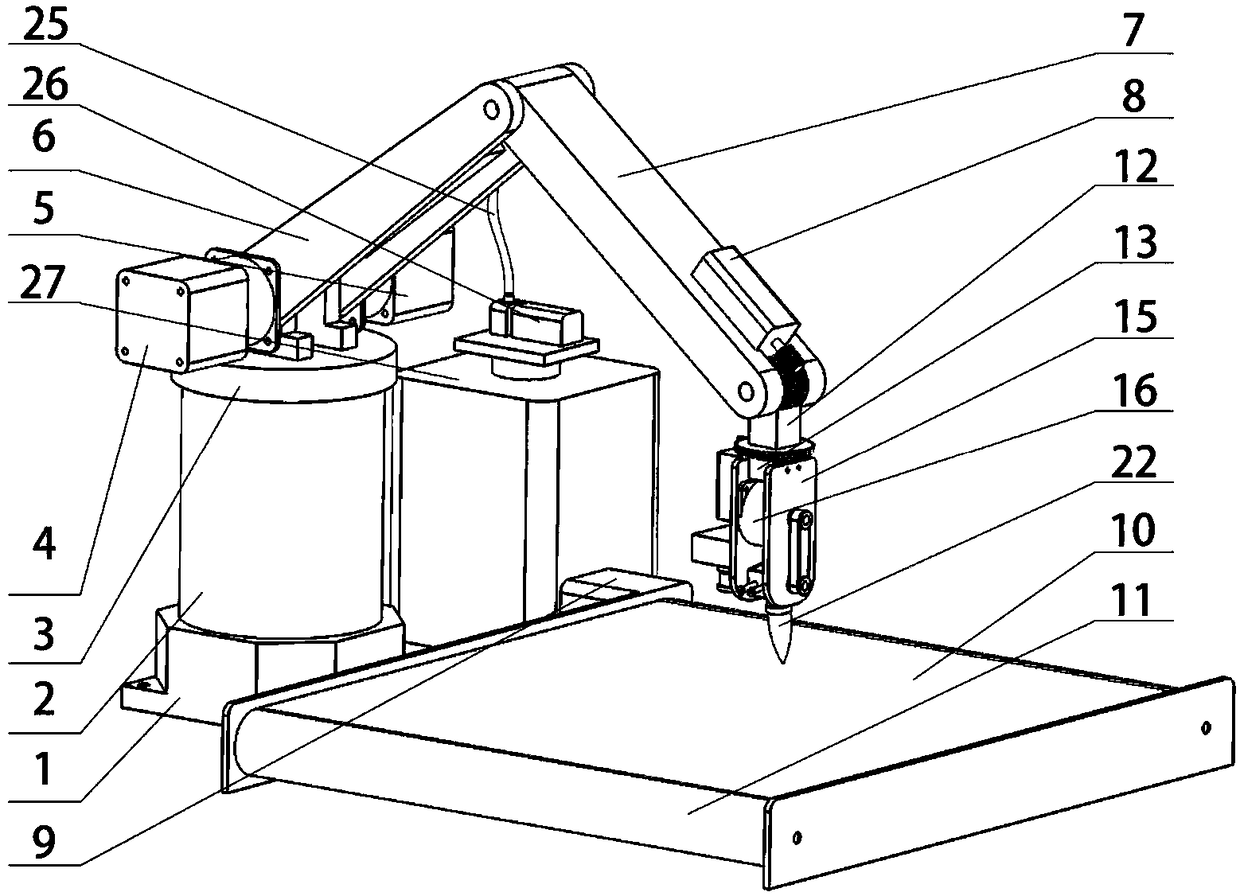
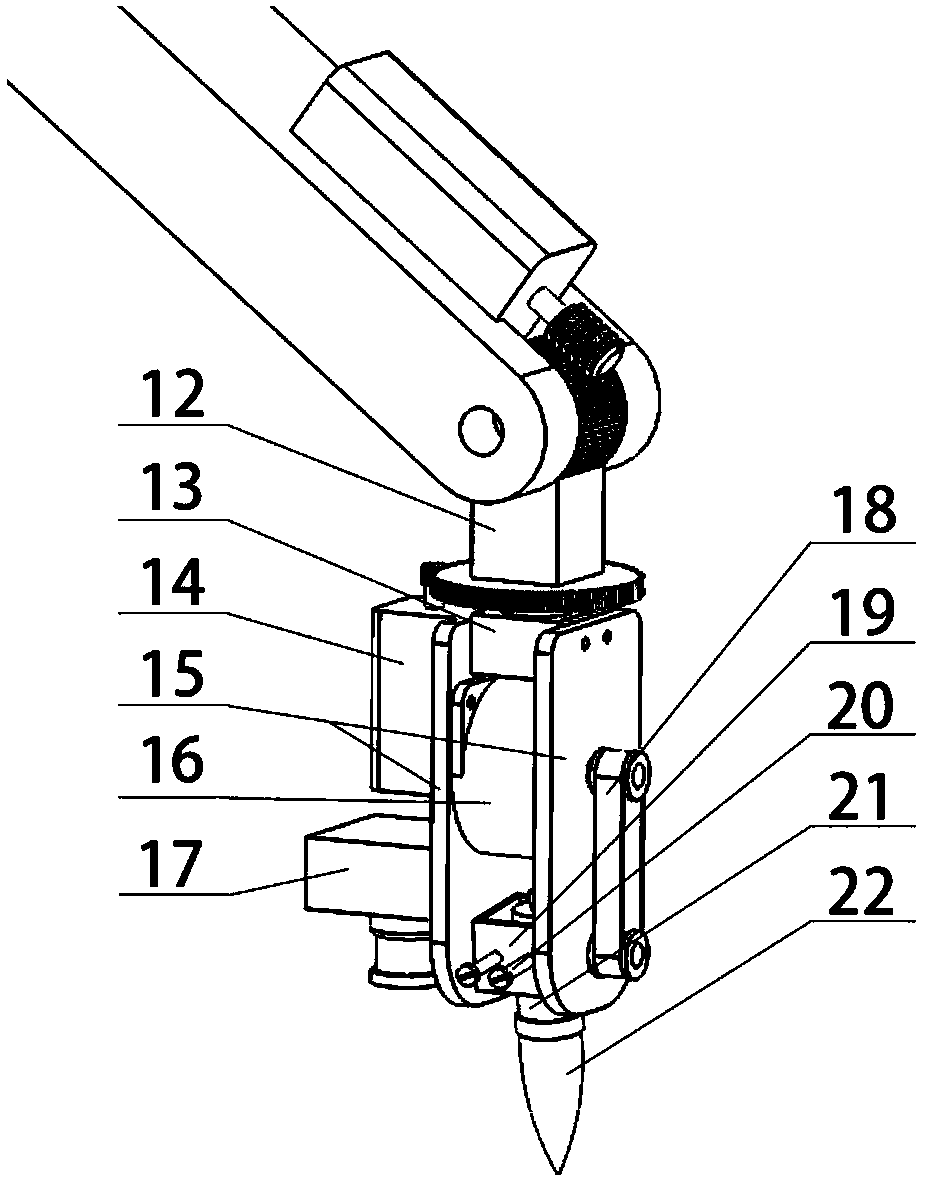
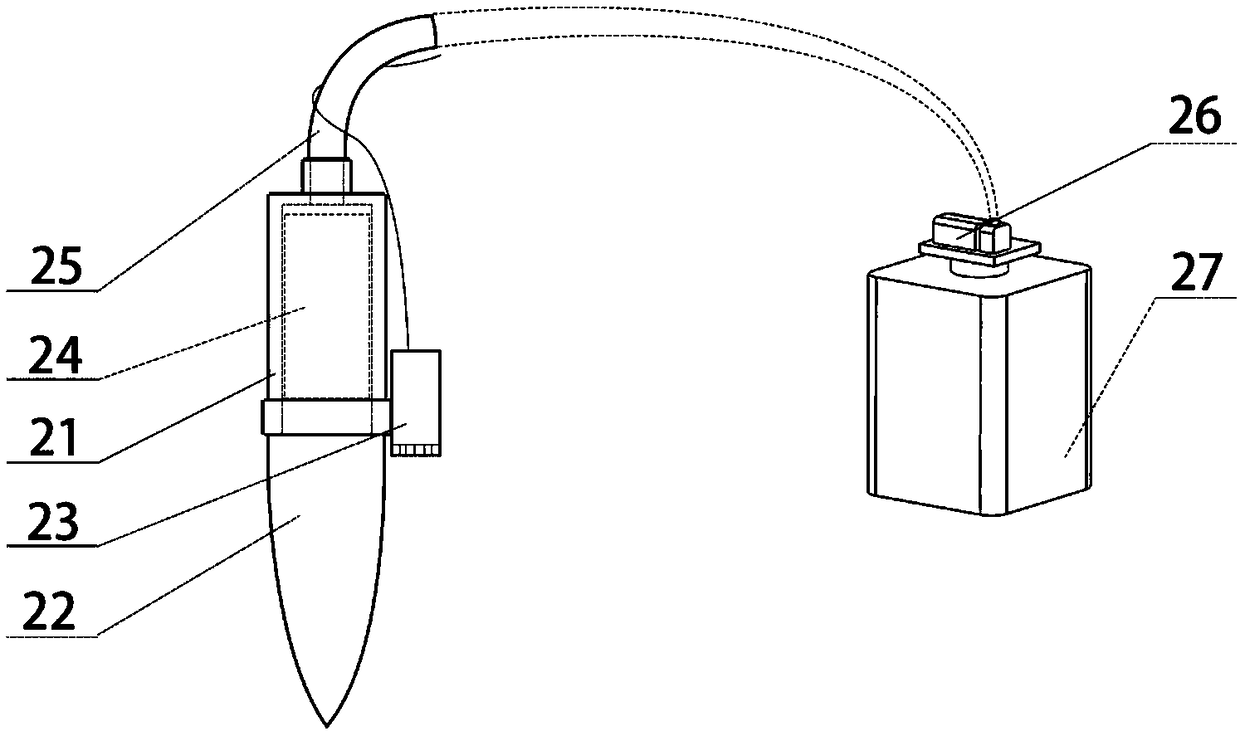
[0056] A kind of calligraphy robot of artificial intelligence of the present invention, as figure 1 , figure 2 and image 3 As shown, it includes base 1, stepping motor A2, rotating disk 3, stepping motor B4, stepping motor C5, large cantilever 6, small cantilever 7, stepping motor D8, rolling paper motor 9, rice paper 10, Paper reel 11, connecting rod 12, rotating shaft 13, stepping motor E 14, splint 15, stepping motor F 16, self-learning camera 17, timing belt 18, pen clip 19, fastening screw 20, automatic ink-out brush 21, ink delivery hose 25, ink delivery pump 26 and ink ink box 27. Wherein, stepping motor A 2 is housed above base 1, and stepping motor A 2 realizes the rotation of whole mechanical arm by driving rotary disk 3 to rotate; Large cantilever 6 is installed on the rotating disk 3, and the end of big cantilever 6 is equipped with small The cantilever 7 can drive the rotation of the large cantilever 6 and the small cantilever 7 in the vertical direction thro...
specific Embodiment approach 2
[0093] Adopt the mode writing brush of manipulator to have the shortcoming that cost is higher. This embodiment adopts a three-axis parallel structure to write brush characters, which has a simple structure and stable operation. A calligraphy robot with a three-axis parallel structure such as Figure 8 and Figure 9 As shown, it includes paper roll motor 9, rice paper 10, roll paper tube 11, self-learning camera 17, pen holder 19, automatic ink output brush 21, ink cartridge 27, robot support 36, slide rail 37, lead screw 38, spiral soft Tube 39, slider 40, stepping motor G 41, stepping motor H 42, stepping motor I43, connecting rod 44, stepping motor J 45, center platform 46, rotating platform 47, stepping motor K 48, stepping Motor L 49 and pitch seat 50. Three leading screw 38 and three slide rails 37 are vertically installed on robot support 36, and slide block 40 is installed on each slide rail 37, and three slide blocks are connected with central platform 46 by connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More