

Multi-source target fusion method based on track matching
A fusion method and target technology, applied in the field of automatic driving and advanced assisted driving, can solve the problem of frequent interruption of target trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below with reference to the drawings and specific embodiments.
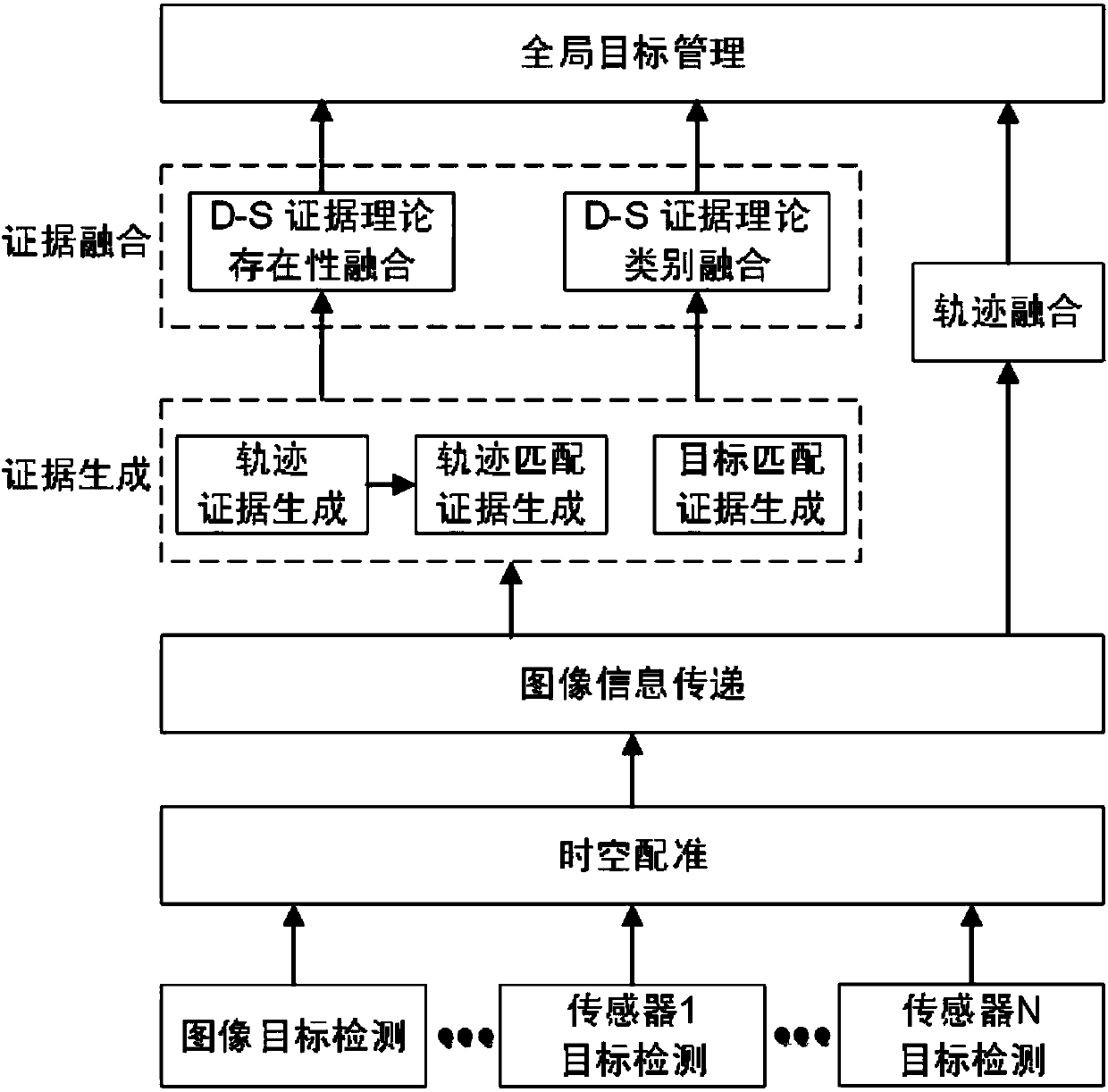
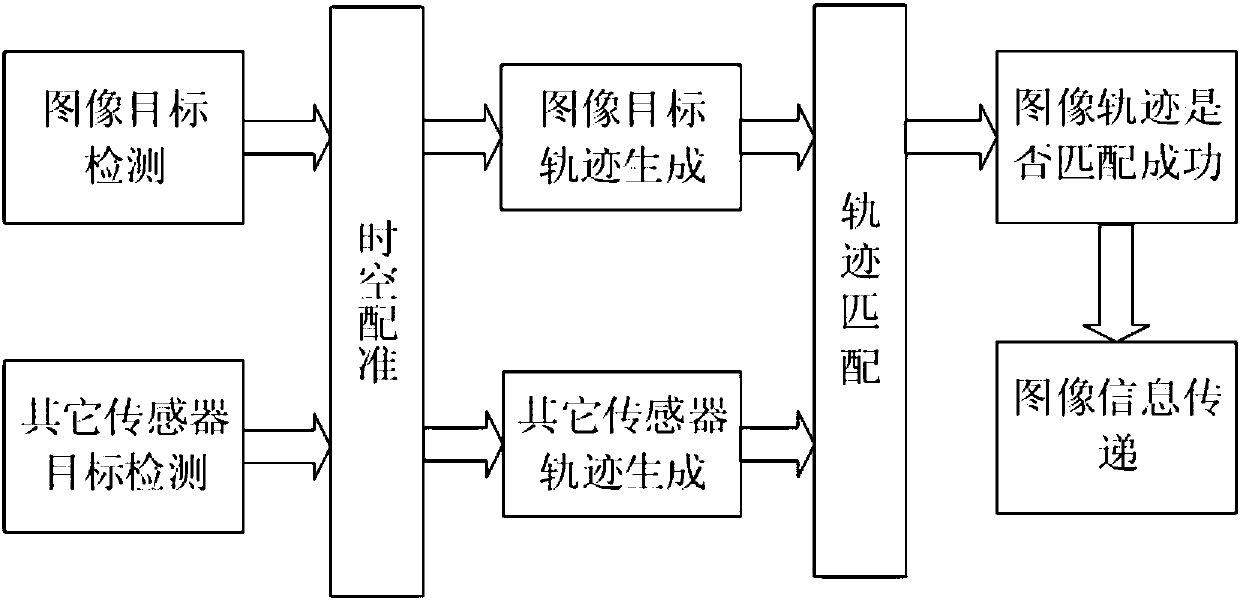
[0057] reference Figure 1 to Figure 3 , The multi-source target fusion method based on trajectory matching of the present invention includes the following steps:
[0058] Step 1. Use multiple sensors to collect target information, including image sensors for providing category information, 8-line lidar, 16-line lidar, millimeter-wave radar, etc. The image sensor is a camera.
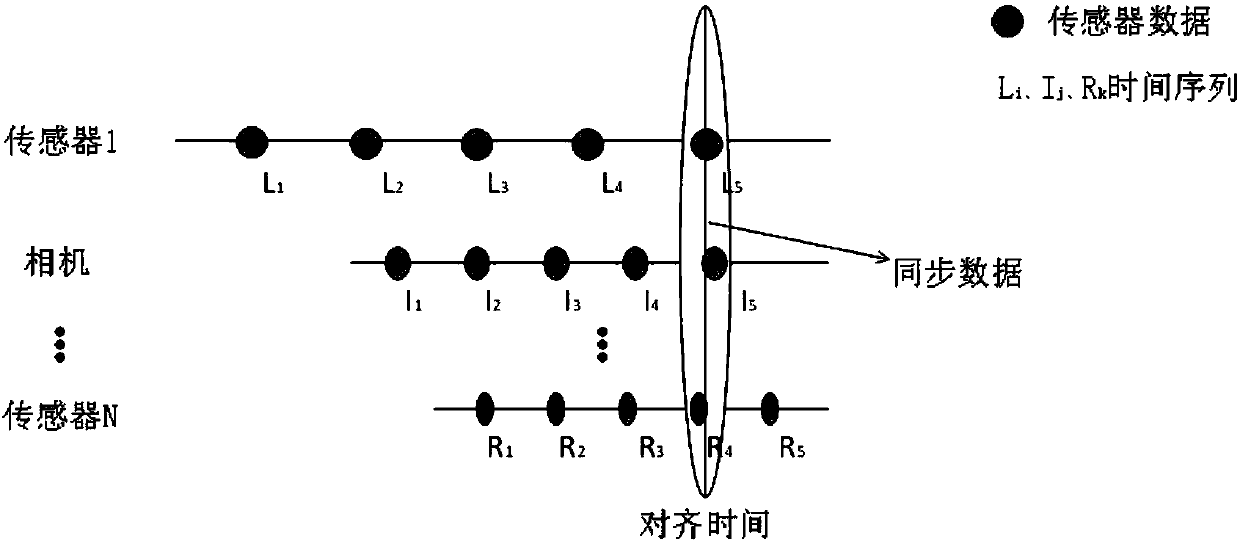
[0059] Step 2: Use a unified time coordinate system and geographic coordinate system to perform time registration and spatial registration of the target information collected by each sensor. That is, the target information of each sensor adopts a unified time coordinate system and a geographic coordinate system to align time and space to obtain a unified target state vector.
[0060] reference figure 2 , In step 2, the time synchronization method is adopted to perform multi-sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More