

Scheduling method and system for safety guarantee of electric power tunnel inspection robot
A technology for inspection robots and power tunnels, which is applied to manipulators, earthwork drilling, mining equipment, etc. It can solve problems such as damage to robots or fire doors, congestion of robots, and impact on the service life of robots, so as to avoid accidental injuries of robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] It should be pointed out that the following detailed description is exemplary and intended to provide further explanation to the present application. Unless defined otherwise, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this application belongs.
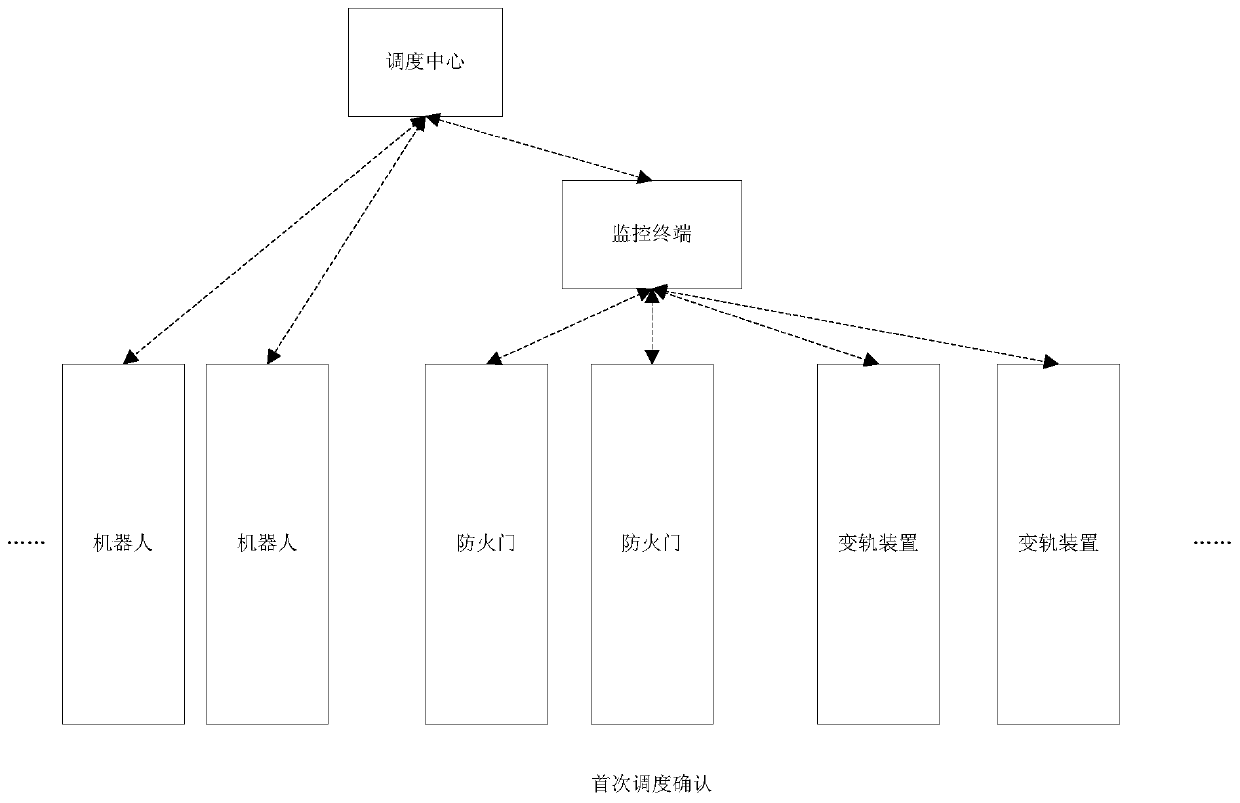
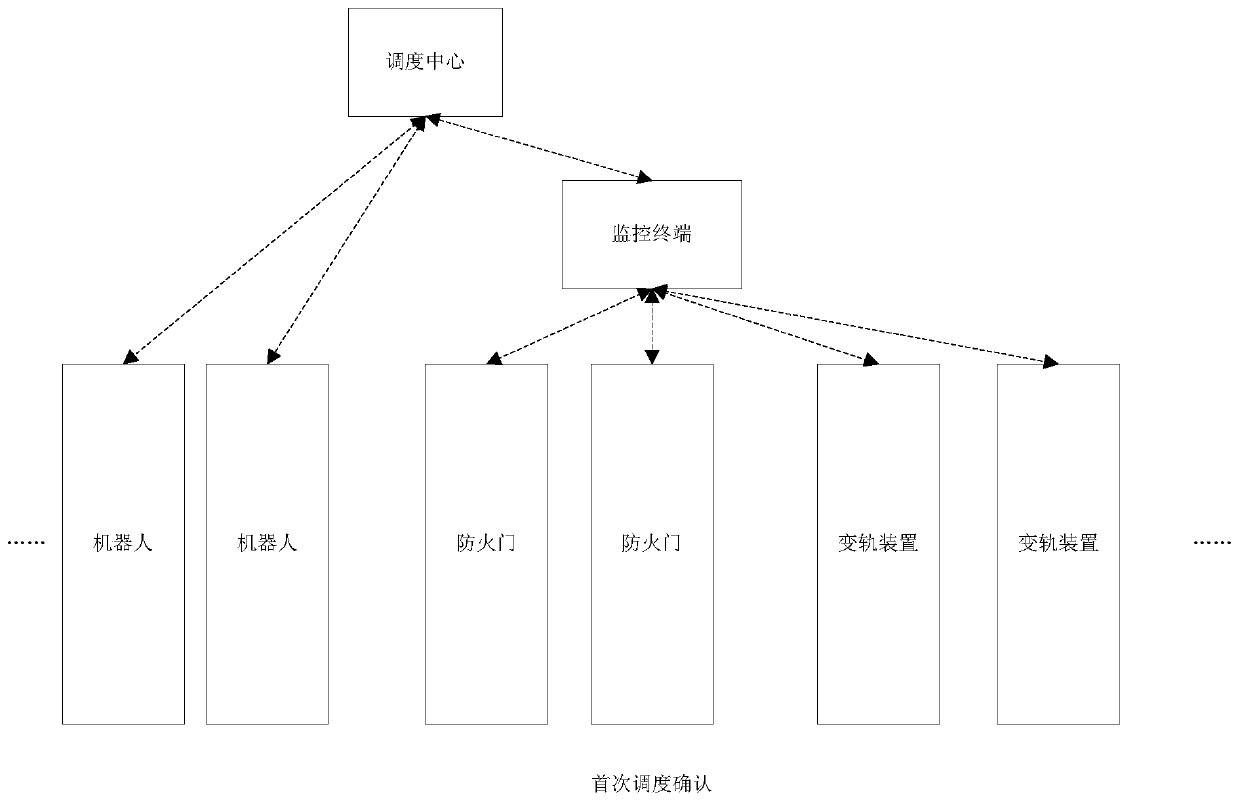
[0062] The walking safety guarantee scheduling method of the power tunnel inspection robot includes:
[0063] The dispatch center collects the position information of the robot through the position acquisition device installed on the robot, and monitors the position of the robot in real time. When it is found that the robot moves within the first set range from the fire door, the dispatch center collects the current fire door position through the monitoring terminal. The opening and closing status of the fire door, the dispatching center will confirm the opening and closing status of the fire door for the first time, such as figure 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More