

Coanda effect propelling system and underwater robot
A technology of propulsion system and Coanda effect, applied in the direction of propulsion components, ship propulsion, underwater ships, etc., can solve the problems affecting the application prospect of underwater robots, complex design, poor stability, etc., to achieve flexible multi-degree-of-freedom motion, structure Simple and stable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
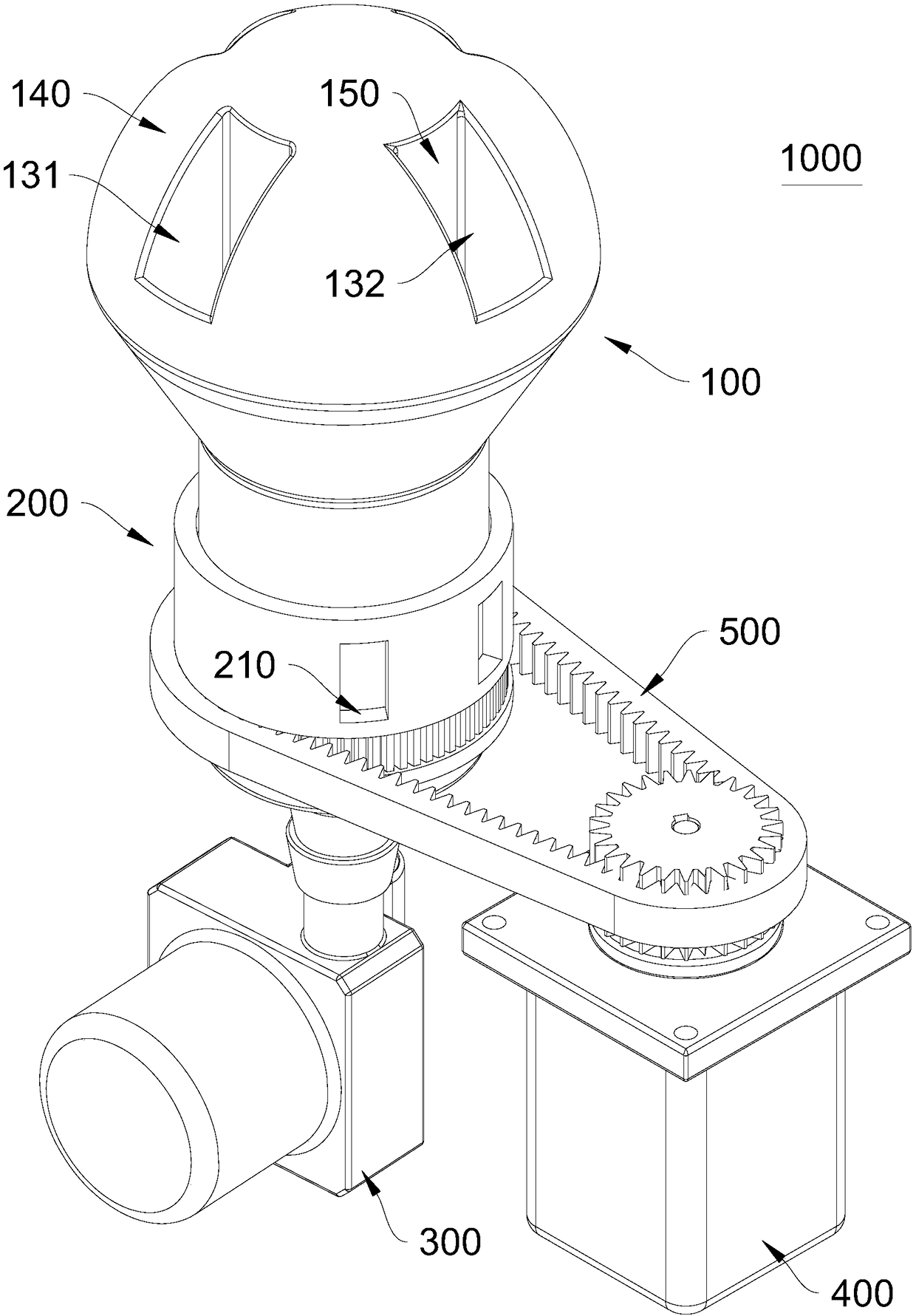
[0043] Please refer to Figure 1-5 , this embodiment provides a Coanda effect propulsion system 1000 . The Coanda effect propulsion system 1000 includes: an effect valve, a water injection power unit 300 and a regulating power unit 400 .
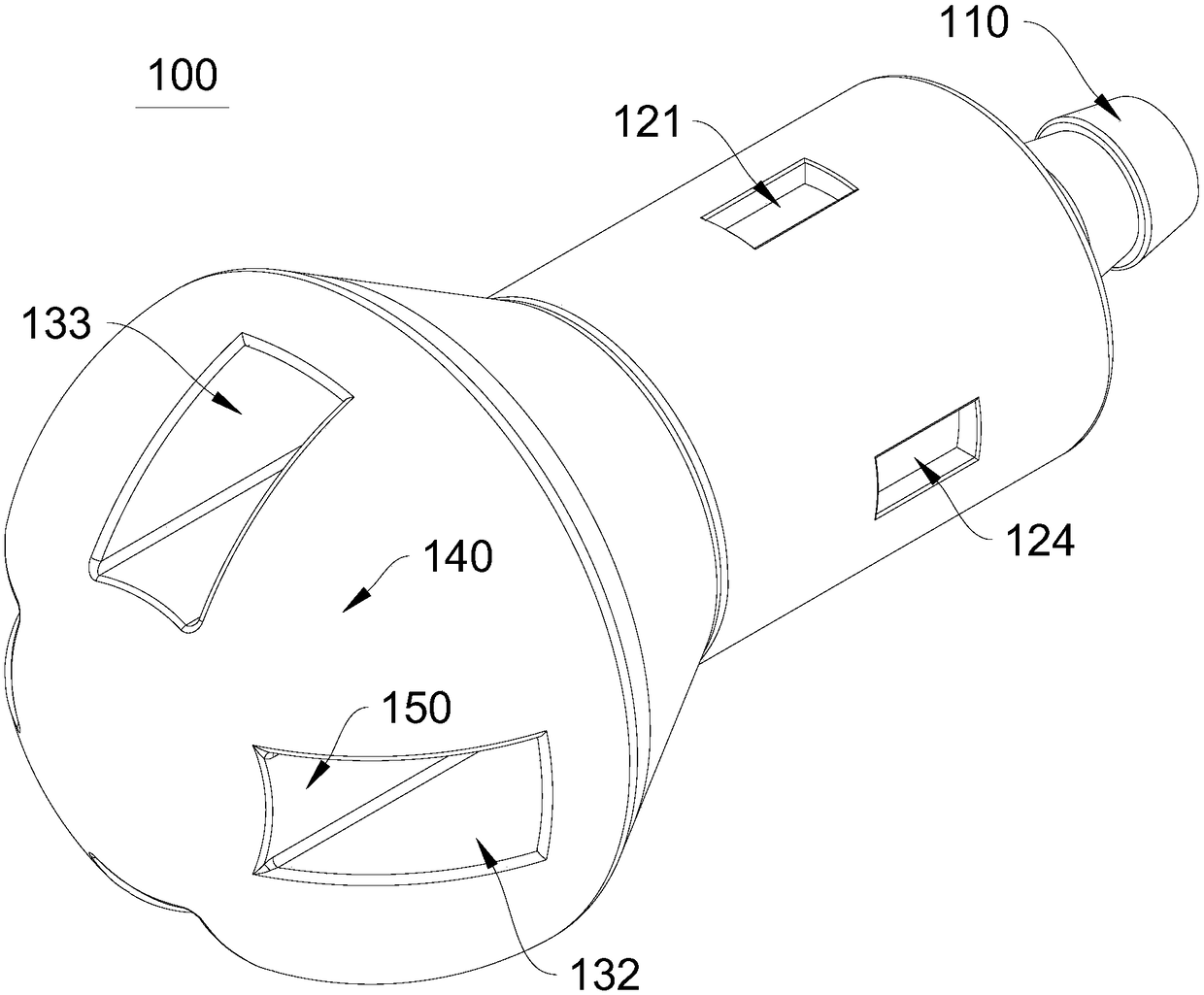
[0044] The effect valve includes a water spray tube 100 and a control ring 200. The water spray tube 100 has an inner cavity, and one end of the water spray tube 100 is provided with a water inlet 110 communicating with the inner cavity.
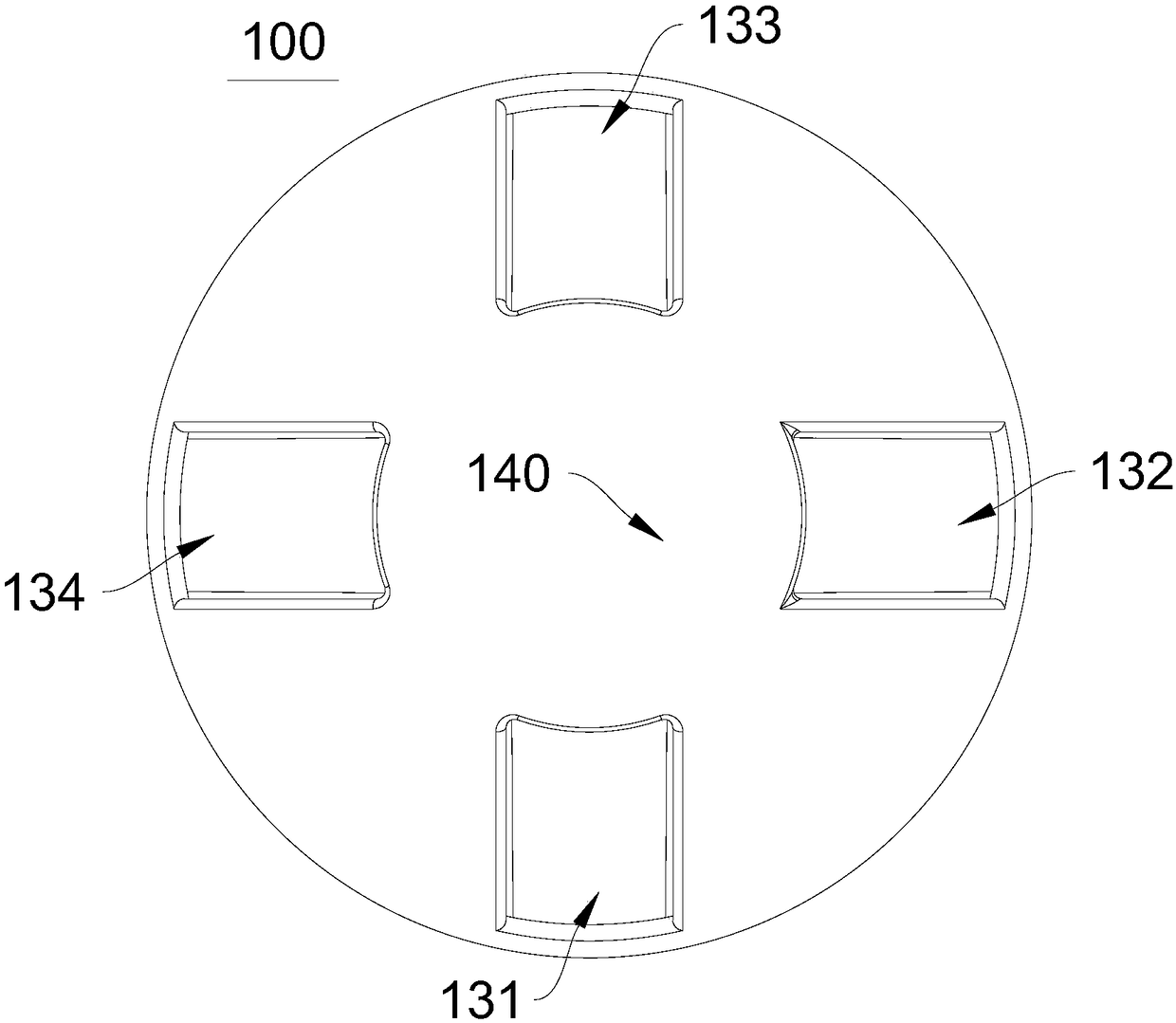
[0045] The water spray tube 100 also has multiple groups of effect openings, and the multiple groups of effect openings are arranged at intervals along the circumference of the water spray tube 100 . Each group of effect openings includes a first opening and a second opening communicating with the inner cavity. The first opening is opened on the side wall of the water spray tube 100 , and the second opening is opened on the end of the water spray tube 100 away from the water inlet 110 . Along the axial d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More