

A crane simulator somatosensory simulation method and device
A technology for simulating devices and cranes, which is applied in the direction of simulating devices, simulators, and instruments for space navigation conditions. It can solve problems such as device limitations, failure to meet the requirements of the crane's operating environment, and small field of vision, and achieve reduced mechanical structure complexity. Reduce purchase and maintenance costs, and the human body feels realistic effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
[0035] The invention relates to a somatosensory simulation method and device for a crane simulator, comprising a parallel three-degree-of-freedom motion platform, a somatosensory simulation control method, and a washing-out algorithm.
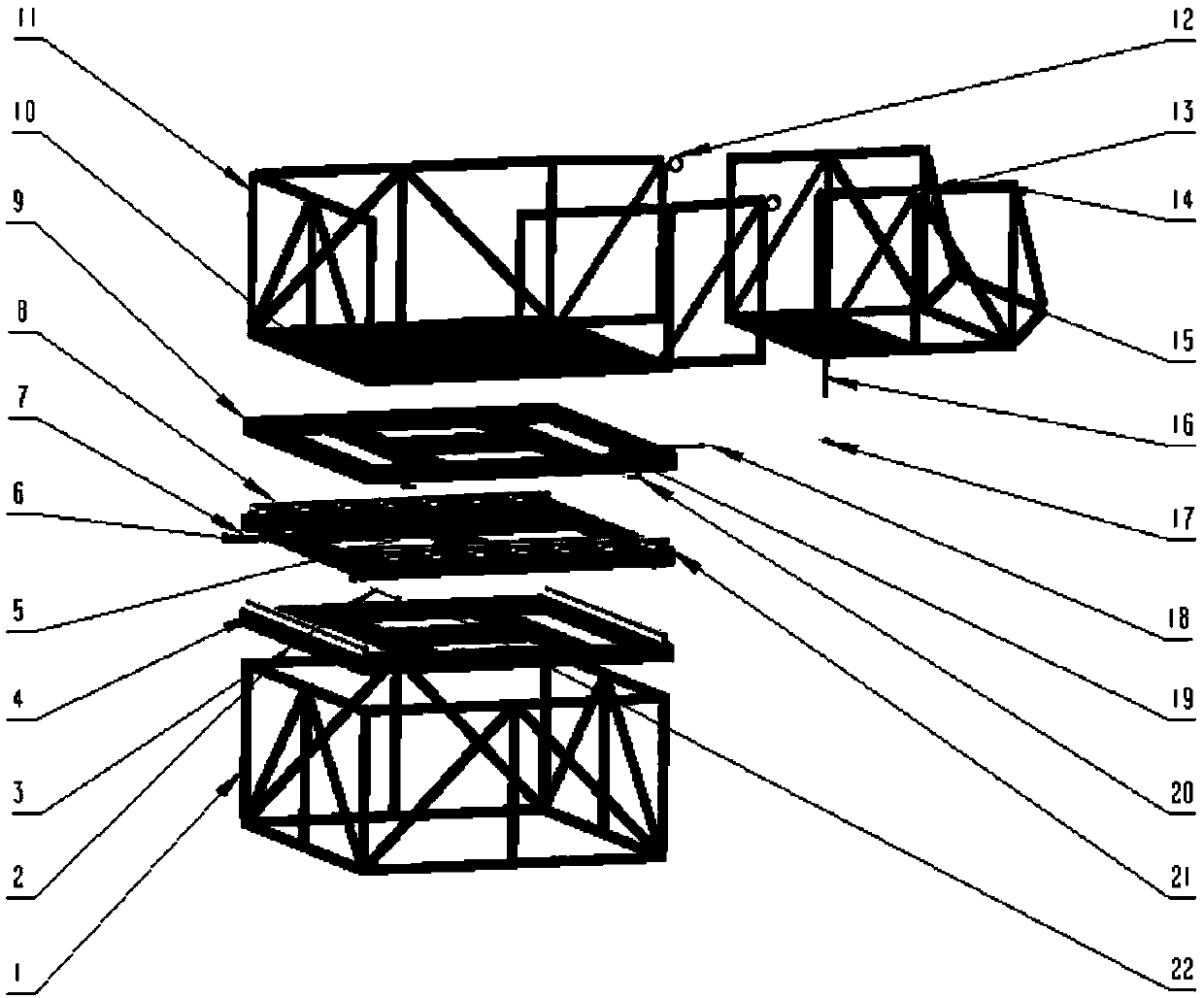
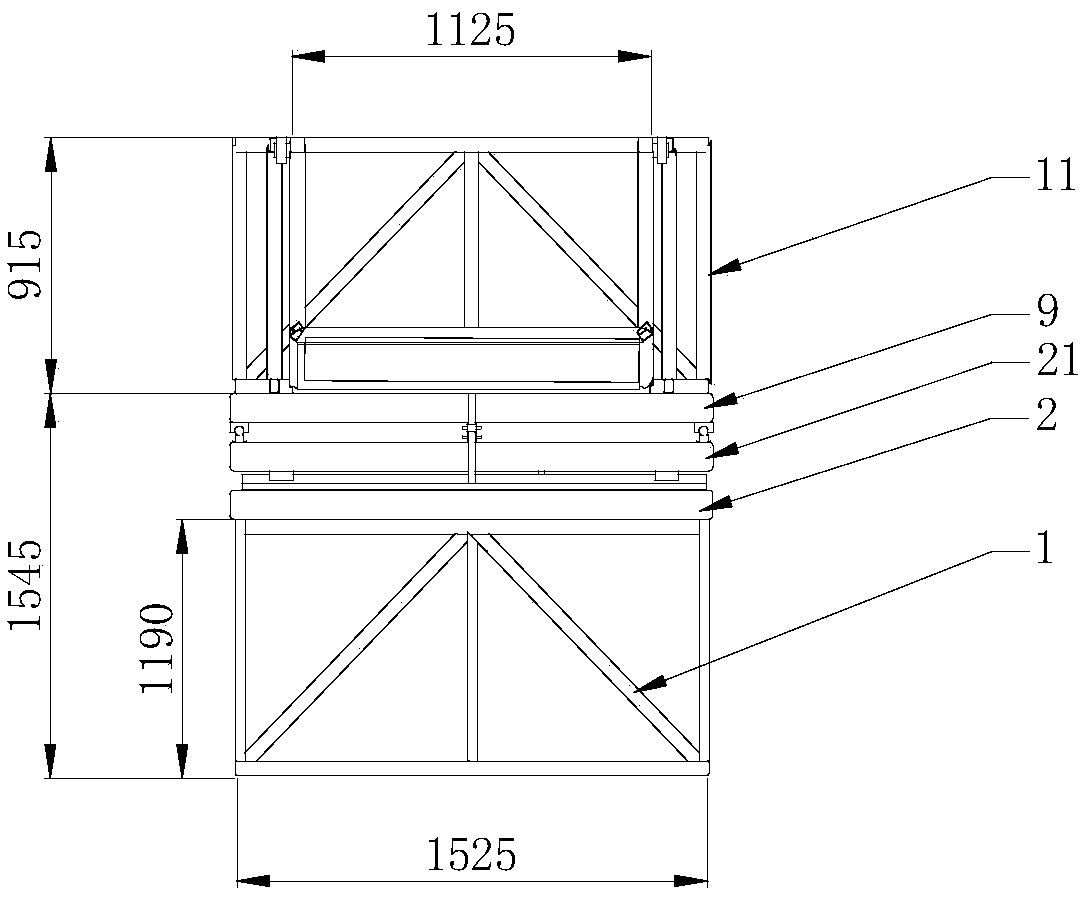
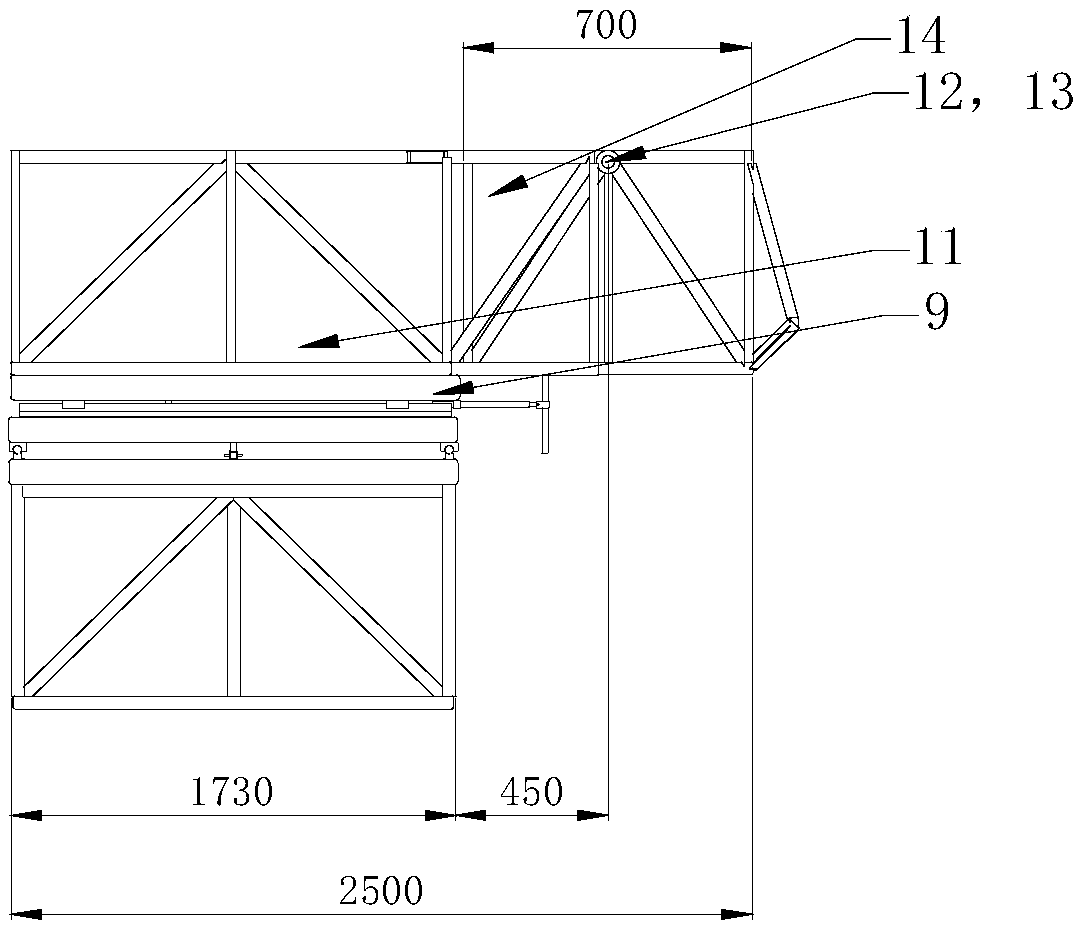
[0036] combine figure 1 , the motion mechanisms of the motion platform are realized by the following methods: the parallel three-degree-of-freedom motion platform includes three sets of rail frames 2, 21, and 9 with the same size, and the horizontal rails 4 laid by the lower rail frame 2 are installed with the middle rail frame 21. The sliding sleeve 6 cooperates, and the two ends of the transverse guide rail 4 are equipped with baffles; the longitudinal rail 8 laid by the middle rail frame 21 cooperates with the sliding sleeve 20 installed on the upper rail frame 9, and the two ends of the longitudinal rail 8 are equipped with baffle p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More