

Self-balancing unmanned bicycle based on behavior driving and behavior driving control method thereof
An unmanned and bicycle technology, applied in the field of transportation, can solve the problems of no bicycle variable decomposition mapping, no direct driving force for two wheels, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0151] Taking the balance control of an unmanned bicycle with the behavior-driven control method as an example, an unmanned bicycle with self-balancing function will be described in detail below.
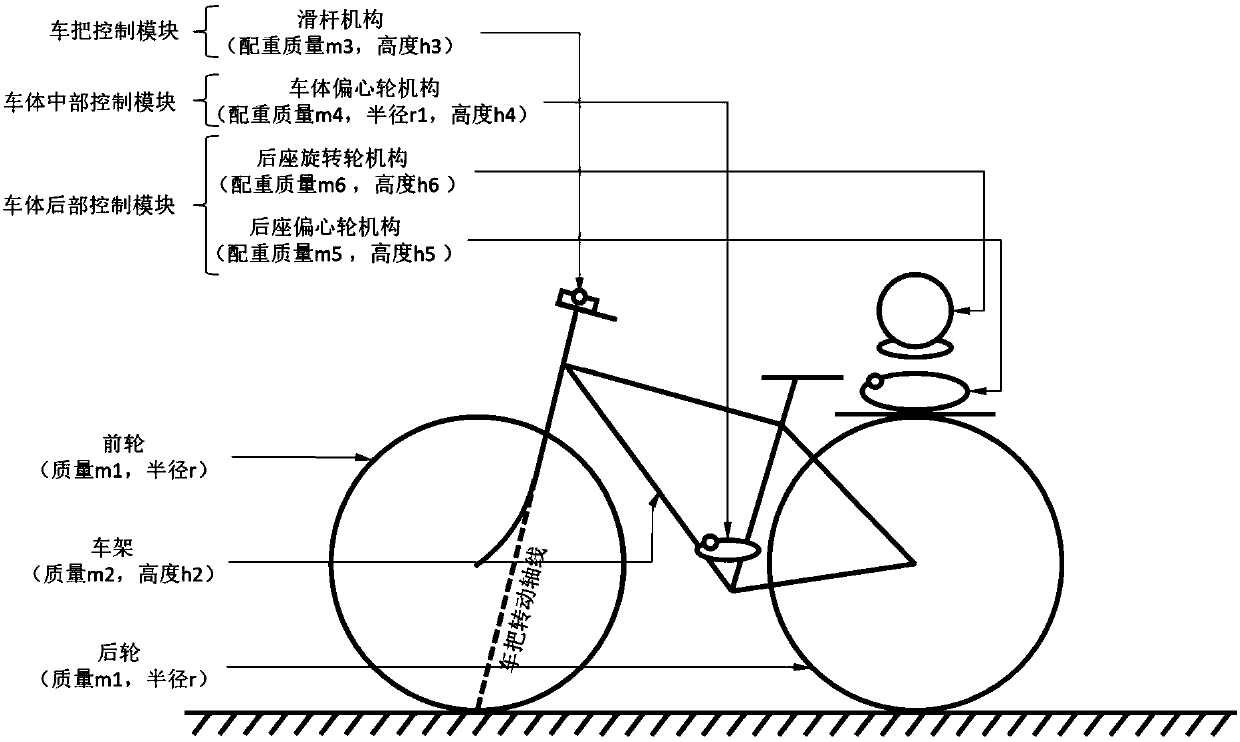
[0152] At time t0, before being put into use by users, the three devices, the handlebar control module, the middle control module of the vehicle body, and the rear control module of the vehicle body (including the sensor module), are installed on the ordinary bicycle, and based on the behavior-driven The control method builds the controller and superimposes the driverless control method.
[0153] Such as Figure 4 As shown, the specific steps of the behavior-driven control method are as follows:
[0154] 1) Selection of key variables: select controllable and considerable key variables, including the variables of the bicycle and the control variables of the handlebar control module, the middle control module of the car body, and the rear control module of the car body; the variables...
Embodiment 2
[0187] Taking the balance control of an unmanned bicycle with the control method of decomposing key balance as an example, a kind of unmanned bicycle with self-balancing function will be described in detail below.
[0188] At time t0, before being put into use by the user, the three devices, the handlebar control module, the middle control module of the car body, and the rear control module of the car body (including the sensor module), are installed on the ordinary bicycle, and based on the decomposition of the key balance The control method of the controller is established, and the control method of the unmanned vehicle is superimposed.
[0189] Such as Figure 7 As shown, the specific steps of the control method for decomposing the key balance are as follows:
[0190] 1) Selection of key variables: select controllable and considerable key variables, including the variables of the bicycle and the control variables of the handlebar control module, the middle control module o...
Embodiment 3
[0209] Taking the balance control of an unmanned bicycle with the control method of equivalent mapping as an example, a kind of unmanned bicycle with self-balancing function will be described in detail below.
[0210] At time t0, that is, before putting it into use by the user, the three devices, the handlebar control module, the middle control module of the car body, and the rear control module of the car body (including the sensor module), are installed on the ordinary bicycle, and based on the equivalent mapping The control method of the controller is established, and the control method of the unmanned vehicle is superimposed.
[0211] Such as Figure 8 As shown, the specific steps of the control method of the equivalence mapping are as follows:
[0212] 1) Selection of key variables: select controllable and considerable key variables, including the variables of the bicycle and the control variables of the handlebar control module, the middle control module of the car body...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More