

Automatic driving lane changing preparation and execution integrated trajectory planning method
A trajectory planning and automatic driving technology, which is applied in the direction of mechanical equipment, combustion engines, road network navigators, etc., can solve the problem of immature technology of automatic driving vehicle lane changing, imperfect technology of automatic driving vehicle lane changing, ignoring the decision-making and execution process Contact and other issues, to achieve high comfort experience and efficiency experience, to ensure safety, and to ensure the integrity of the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
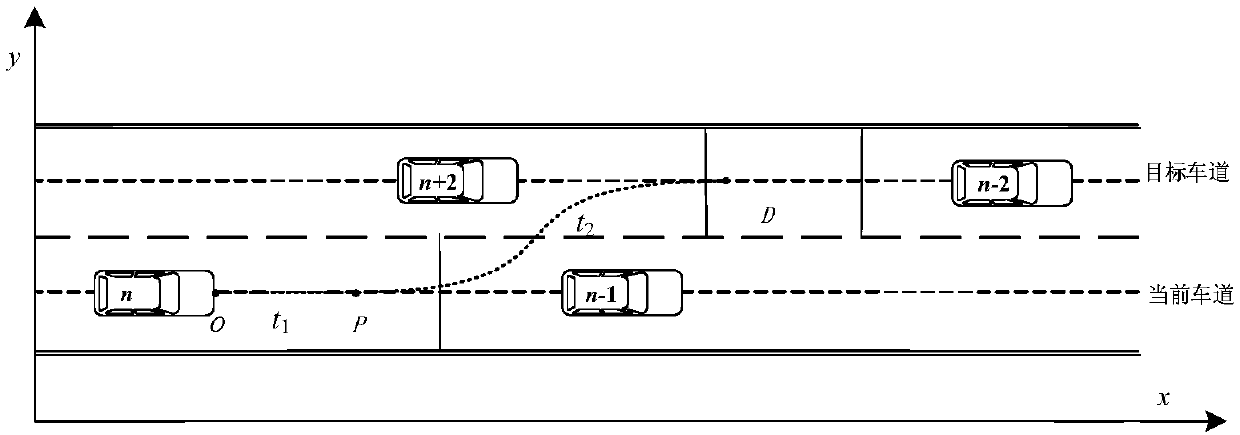
[0025] An automatic driving lane change preparation and execution integrated trajectory planning method, comprising the following steps:
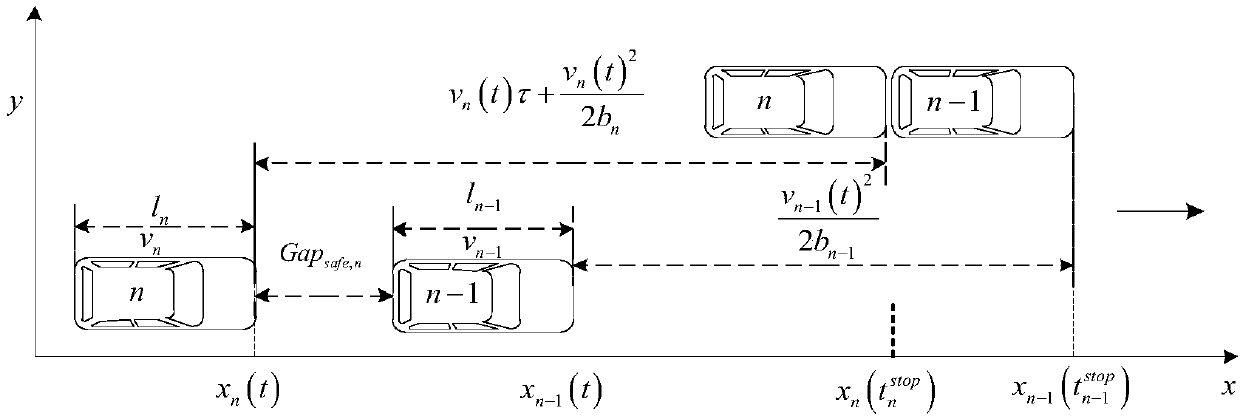
[0026] Step 1. Determine the longitudinal position x of the vehicle in front of the current lane and the vehicle in front of and behind the target lane according to the movement state of the surrounding vehicles during the lane change i (t) relationship to time;
[0027] Step 2. Assuming that the lane-changing vehicle is moving at a constant speed or uniformly increasing / subtracting during the lane-changing preparation process, determine the trajectory x of the lane-changing vehicle during the lane-changing preparation process n (t), get the longitudinal position coordinate x of the vehicle at the execution point of lane change n (t 1 ), and the lane change preparation time t 1 , and the acceleration a of the lane change preparation process OP ;
[0028] Step 3. Introduce a cubic polynomial to plan the trajectory of the lane change exe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More