

Mobile robot system based on artificial road sign and docking method thereof and storage medium
A technology of mobile robots and road signs, which is applied in the direction of control/regulation systems, instruments, motor vehicles, etc., can solve the problem of the small range of accurate docking of robots, and achieve a large working range, simple and convenient system installation and setting, and a small degree of transformation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
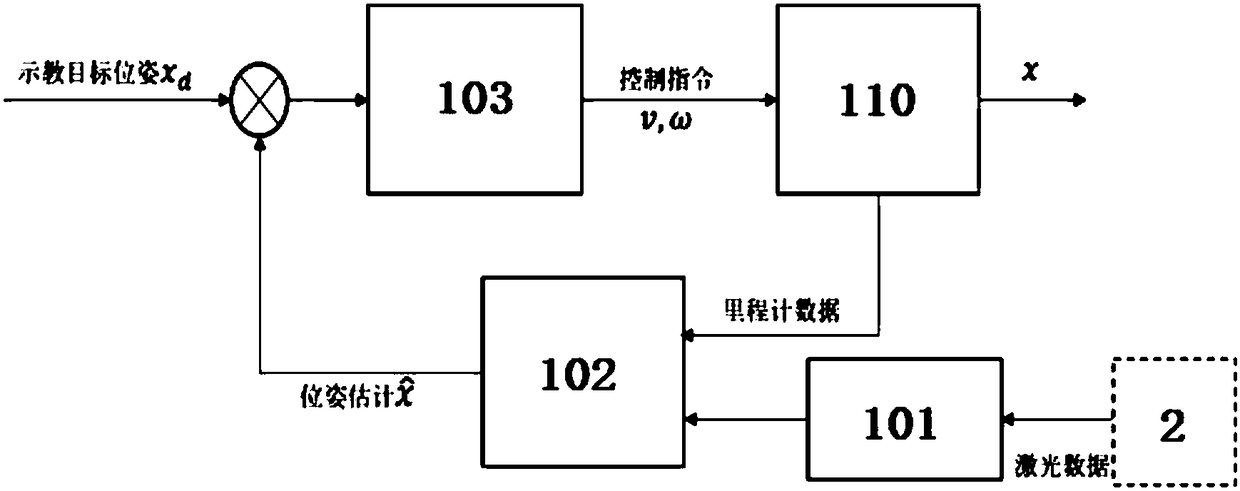
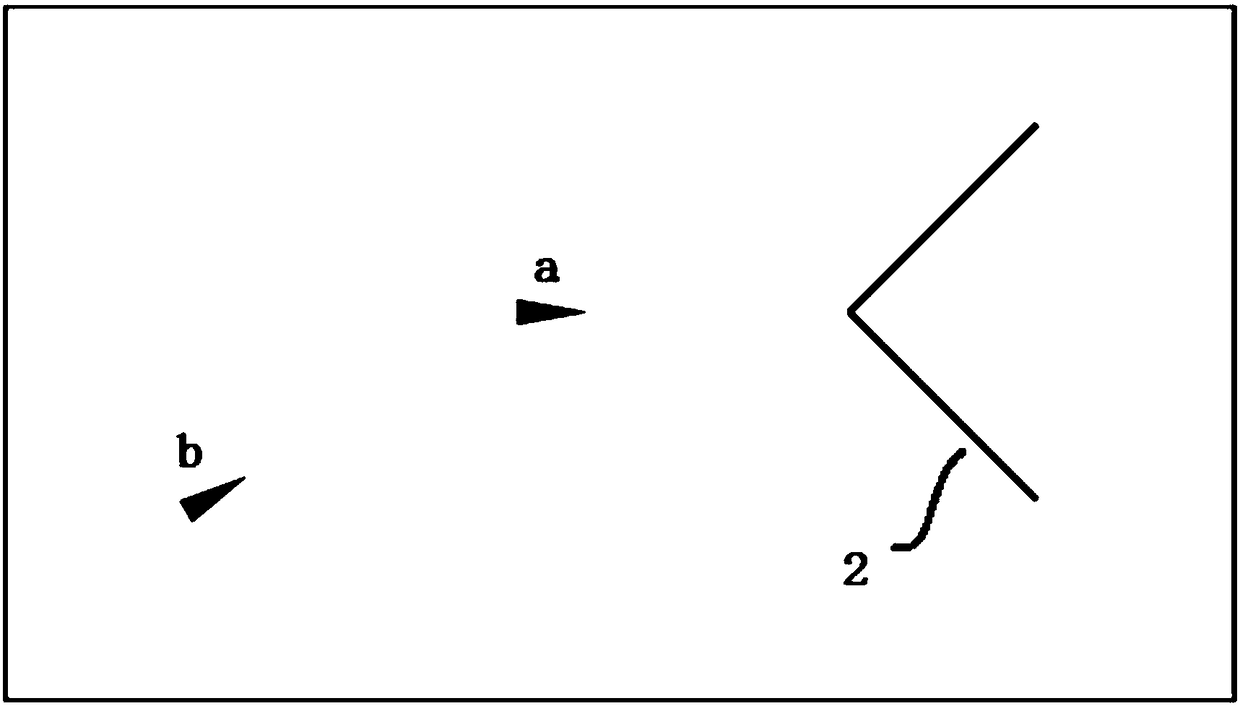
[0053] According to the work tasks of the mobile robot, the mobile robot needs to stop at a certain point directly in front of the artificial landmark 2, with a posture facing the artificial landmark 2, such as figure 2 shown. During the docking process of the mobile robot, the sensors on the mobile robot are used to collect the surrounding environment data. The landmark recognition module 101 recognizes the artificial landmarks 2 placed near the docking point. The positioning module 102 takes the recognition result as input and calculates the relative The real-time pose of the artificial landmark 2, and then obtain the deviation from the docking target pose obtained through teaching. The navigation control module 103 takes the pose deviation as input, and calculates the navigation control command to control the structure body 110 to move to the desired docking position. target point and stop in the desired direction.
[0054] Before using the mobile robot system based on ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More