

Automatic parking control algorithm based on driving experience
A technology of automatic parking and control algorithm, applied in the direction of control devices, vehicle components, external condition input parameters, etc., can solve the problems of calculation volume, high real-time requirements, complex implementation, large calculation volume, etc., to achieve clear physical meaning, Achieve low cost and good real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
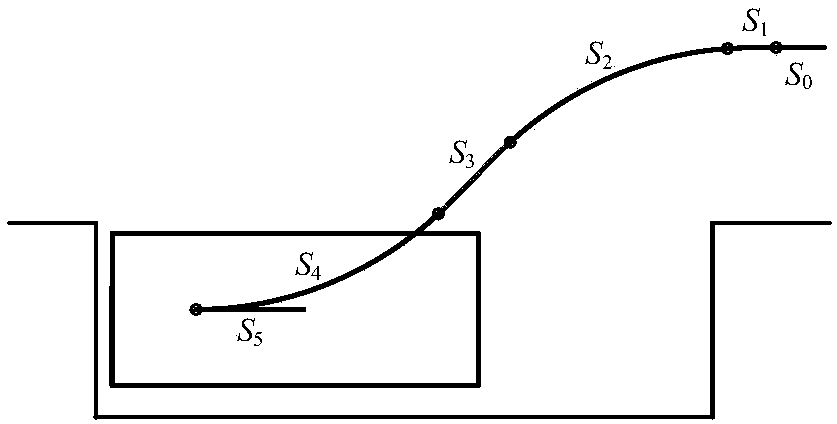
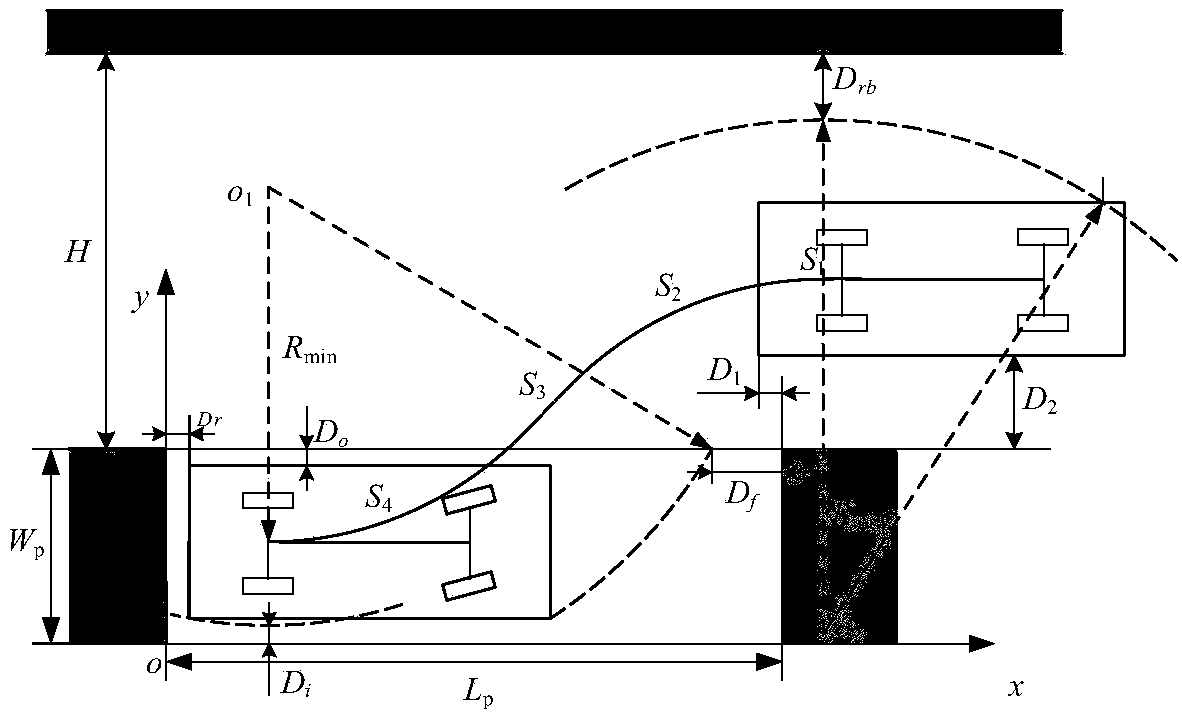
[0036] see figure 1 and figure 2 As shown, this embodiment specifically discloses an automatic parking control algorithm based on driving experience, and the specific implementation steps are as follows:
[0037] Step S1, judge whether the parking space and parking space are too small according to the parking space parameters, parking space and car parameters, if they are too small, no longer perform automatic parking, otherwise, go to the next step, and the judgment formula can be obtained according to the following formula:
[0038]
[0039] In the formula, L P and W P Respectively, the length and width of the parking space, L Pmin and W Pmin Respectively, the length and width of the minimum parking space, H is the width of the road, H min is the minimum parking space width, R vmin is the minimum turning radius of the car, R min is the minimum turning radius at the midpoint of the rear axle of the vehicle, L v and W v are the length and width of the car respecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More