Optical flow tracking and double geometric model-based initial pose estimation method
An optical flow tracking and geometric model technology, applied in the information field, can solve the problems of poor robustness, invalid model solution, large initial pose error, etc., to achieve the effect of small error and fast data association
Inactive Publication Date: 2018-08-21
HARBIN INST OF TECH SHENZHEN GRADUATE SCHOOL
View PDF4 Cites 12 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] However, there are certain defects in the above two methods
There is a strong assumption in the optical flow tracking + homography matrix initial pose estimation method: the feature points of the image are on the same plane, and the scene in most cases does not meet this assumption, and the feature points are not on the same plane, so in this case The initial pose error of the solution below is relatively large, which may easily lead to the failure of monocular visual odometer initialization and poor robustness
The initial pose estim
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
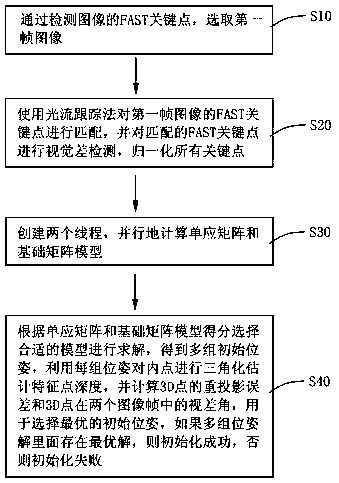
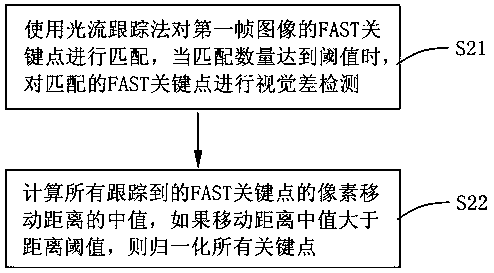
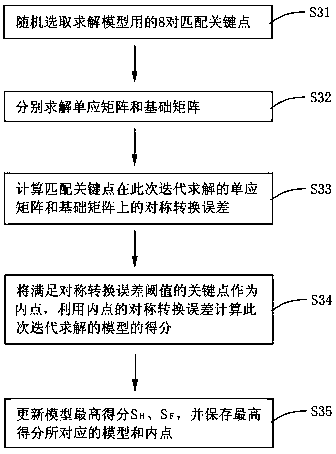
The invention discloses an optical flow tracking and double geometric model-based initial pose estimation method. The method comprises the following steps of selecting a first frame image by detectingFAST key points of an image; performing matching on the FAST key points of the first frame image by using an optical flow tracking method, performing vision difference detection on the matched FAST key points, and normalizing all the key points; creating two threads, and calculating homography matrix and basic matrix models in parallel; and according to scores of the homography matrix and basic matrix models, selecting the proper model to perform solving. Only the first frame image is subjected to FAST key point detection, and then the key point matching is performed by using the optimal flowtracking method, so that quick data association can be realized; and the homography matrix and basic matrix models are estimated at the same time, and the proper model is selected through a scoring mechanism to solve an initial pose, so that initialization of a monocular visual odometer can be performed robustly in planar and non-planar scenes, and an error of the estimated initial pose is relatively small.
Description
【Technical field】 [0001] The invention relates to the field of information technology, in particular to an initial pose estimation method based on optical flow tracking and dual geometric models. 【Background technique】 [0002] In the initial stage of monocular visual odometry, there is only information between images, and there is no three-dimensional space information. At this time, initialization is required to estimate the initial pose and construct the initial map. The existing initial pose estimation methods mainly include optical flow tracking + homography matrix estimation method and ORB + homography matrix / fundamental matrix estimation method. The optical flow tracking + homography matrix estimation method tracks FAST key points through optical flow, performs data association, and uses the homography matrix model to solve the initial pose; the ORB + homography matrix / fundamental matrix estimation method performs data extraction and matching through ORB features Ass...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G06T7/77G06T7/246G06T7/269G06T7/00G06T7/50
CPCG06T7/248G06T7/269G06T7/50G06T7/77G06T7/97
Inventor 练佳威叶允明李旭涛苏俊钦
Owner HARBIN INST OF TECH SHENZHEN GRADUATE SCHOOL

PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



